Open Student Thesis Offers
When writing your thesis at TUM I6, please follow our thesis guidelines. A guide to writing good thesis can be found here. A collection of useful material for research can be found here.

AI Agents with Language Models
We are looking for students in area LLM, VLM and AI Agents:
[SA/MA] AI Agent Networks and Market-Based Collaboration
[SA/MA] LLM Alignment: Behavior Steering of LLMs
[SA/MA] AI Agents for Computer Games
[SA/MA/BA] Other related topics are also welcome.
If you are interested in one of the topics or if you like to propose a topic, please contact Fengjunjie Pan (f.pan@tum.de).
Robot Learning and VLA for Robotic Manipulation
We are looking for students interested in foundation models and VLA.
[SA/BA/MA] Real-to-Sim-to-Real for Scaling Robot Learning
If you are interested in on of the topics or if you like to propose a topic regarding Robot Learning and VLA, please contact Hang Li (hang1.li@tum.de) and Dr. Zhenshan Bing ( zhenshan.bing@tum.de).
Autonomous Driving: Perception and Safety

We are looking for students interested in implementing perception and risk-based safety models in autonomous driving vehicles, including a pipeline of perception/prediction, scenario risk quantification, and integration to planning algorithms.
[GR/FP/IDP/SA/BA/MA/etc.] Unified Perception and Prediction Module for Autonomous Driving Perception
[GR/FP/IDP/SA/BA/MA/etc.] Applicable Risk Quantification in Autonomous Driving Motion Planning
If you are interested in the topics or have any other ideas about autonomous driving, please contact Yingjie Xu (yingjie.xu(at)tum.de).
DeepSLAM: Deep Learning based Localization and Mapping (Vision-based Perception and Navigation)
If you are interested in one of the topics, please contact Xiang Gao (xiang.gao@tum.de)
Large Vision Language Models in Autonomous Driving and Intelligent Traffic Infrastructure

We are looking for self-motivated students to work on generative AI and multi-modal large language models for autonomous driving and intelligent traffic infrastructure. The following topics are available.
- [MA/GR/BA] Visual Language Model in Autonomous Driving
[MA/GR/BA] World Models and Data Generation for 3D Traffic Environment Understanding
For more information and potenial open topicss, please contact Xingcheng Zhou.
Autonomous Driving, Robotic Grasping, and Dense Prediction (Seeking outstanding students all the time!)
The general research focus is as follows:
- [GR/FP/IDP/SA/BA/MA/etc.] Topic 1: Robotic grasp pose estimation (4D and 6D, Large language model(LLM), Vision language model(VLM), Diffusion policy, Flow matching, Reinforcement Learning, VLA).
- [GR/FP/IDP/SA/BA/MA/etc.] Topic 2: Multi-modal or multi-sensor fusion (RGB+Thermal, RGB+LiDAR, RGB+Depth, RGB+Event) for robust object perception (2D/3D detection, Segmentation).
- [GR/FP/IDP/SA/BA/MA/etc.] Topic 3: LLM for safety-critical scenario generation for autonomous driving (AGI, World model, Code generation).
- [GR/FP/IDP/SA/BA/MA/etc.] Topic 4: End-to-end autonomous driving (Planing, Trajectory prediction, Behavioral intention prediction (BIP), BIP-aware trajectory prediction).
- [GR/FP/IDP/SA/BA/MA/etc.] Topic 5: Medical image segmentation.
- [GR/FP/IDP/SA/BA/MA/etc.] Topic 6: Point Cloud Registration, Absolute Pose Estimation, Vanishing Point Estimation in the Manhattan World, PnP, PnL (Robust localization in dynamic/uncertain environments).
If you are interested in these research topics, please send me an email with your CV and transcript of records. We also have several other open topics in robotics and welcome proposals or ideas from your side. For more information, please contact Dr. rer. nat. Hu Cao.

Quadruped Robot Learning

Our research advances quadruped locomotion with a focus on its adaptivity, agility, and safety using state-of-the-art learning-based methods. We invite motivated students to join us. For more details on the topics below, or to learn about our most recent projects, please email your background to Yulong Xiao (yulong.xiao(at)tum.de).
Keywords: Quadruped locomotion, Reinforcement learning, Imitation learning
Whisker-Inspired Tactile Sensor and Biomimetic Rodent Robot

We aim to design and fabricate a whisker-inspired tactile sensor to enable exteroceptive sensing for a biomimetic mouse robot. Owing to its mechanical flexibility and low computational cost, the whisker sensor is ideally suited for assisting the biomimetic mouse robot in navigating confined, poorly lit, and unstructured environments. Ultimately, this sensor will be integrated into the mouse robot to build a tactile SLAM system, serving to enhance both the robot's environmental awareness and its reactive agility during operation. For more information, please directly contact Yixuan Dang.
- [MA|SA|BA] A Magnetically Transduced Whisker Sensor Array with Heterogeneous Morphologies
- [MA|SA|BA] Dynamic Contact Estimate based on A Whisker-Inspired Tactile Sensor
- [MA|SA|BA] Collision-Aware Locomotion Adaptation for Agile Biomimetic Mouse Robots
- [MA|SA|BA] Tactile SLAM and Bio-Inspired Navigation Using Whisker Sensors for Biomimetic Mouse Robot
Agile Amphibious Locomotion: Design, Control, and Autonomous Navigation of a Miniature Legged Robot.



1. Design and Control of an Active Bio-Inspired Flexible Spine for High-Agility Quadruped Robots
[BA/SA/MA]: [Proposal] (contact: qian.huang@tum.de)
This project is at the exciting intersection of bio-inspired robotics, mechanical innovation, and dynamic control. We aim to solve a fundamental physical limitation of modern quadrupeds: the rigid, passive torso that restricts their movement efficiency. Using CAD modeling and smart actuation, you will design and prototype an active bionic spine that mimics the energy-storing capabilities of a cheetah, a vital innovation for unlocking explosive speed and natural maneuverability in the next generation of robots.
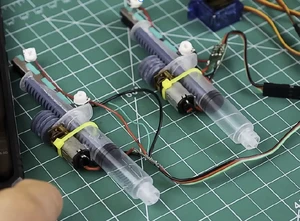
2. Design and Closed-Loop Control of an Active Variable Buoyancy System (VBS) for Next-Gen Amphibious Robots
[BA/SA/MA]: [Proposal](contact: qian.huang@tum.de)
This project is at the challenging intersection of fluid dynamics, precision mechatronics, and autonomous control theory. We aim to solve a critical problem for amphibious robots: achieving energy-efficient "station-keeping" (hovering) at precise underwater depths. Using custom mechanical design and advanced sensor fusion, you will engineer a Variable Buoyancy System (VBS)—essentially an "artificial swim bladder"—and develop the closed-loop algorithms required to let the robot autonomously stabilize, dive, and surface with submarine-like precision.3. Learning to Step: Deep Reinforcement Learning for Robust Foothold Planning in Complex Terrains
3.[High Priority] Learning to Step: Deep Reinforcement Learning for Robust Foothold Planning in Complex Terrains
[BA/SA/MA]: [Proposal](contact: qian.huang@tum.de)
This project is at the cutting-edge intersection of Deep Reinforcement Learning, Embodied AI, and legged robotics. We aim to solve a fundamental limitation of current quadrupeds: the reliance on brittle, hand-coded rules that fail on unstructured terrain. Using massive parallel simulation (NVIDIA Isaac Sim/Mujoco) and state-of-the-art RL algorithms (PPO), you will train a neural network policy that learns to "see" the environment. Your goal is to develop a robust perceptive control pipeline that enables the robot to autonomously identify hazards and select safe footholds with the agility of a mountain goat.
4.[High Priority] Safe Steps: Underwater Terrain Reconstruction for Walking Robots
[BA/SA/MA]: [Proposal](contact: qian.huang@tum.de)
This project explores the domain of Cross-Media Computer Vision and Physics-based Perception. We aim to solve the optical "blindness" robots face at the water's edge, where reflections and refraction distort the view of the riverbed. By combining hardware (Polarizers) with geometric correction algorithms, you will build a vision system that mathematically "undistorts" the water's surface. Your goal is to enable amphibious robots to accurately map underwater terrain and plan safe footholds before they even take a step.
We are actively defining the future of robots that can conquer both land and water. If you have your own ideas regarding agile amphibious legged robot, let's chat!
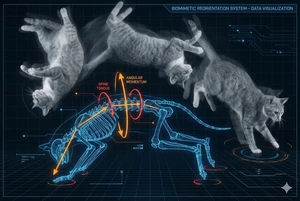
5.[High Priority] Landing Like a Cat: Aerial Self-Righting for Amphibious Robots via Active Spine Control
[BA/SA/MA]:[Proposal](contact: qian.huang@tum.de)
This project explores the fascinating intersection of Bio-inspired Dynamics and Aerial Control. We aim to solve the challenge of safe landing for agile robots without adding heavy, single-purpose reaction wheels (dead weight). Inspired by the "cat righting reflex," you will use Active Spine Control to manipulate the robot's angular momentum mid-air. Using physics simulation (MuJoCo/Isaac Sim) and trajectory optimization, your goal is to teach the robot to vigorously twist and reorient its body in milliseconds, ensuring a perfect four-point landing from any drop angle.
Mentor: Qian Huang
Hardware Accelerator and Application-Specific Integrated Circuit Design for Robotic Applications
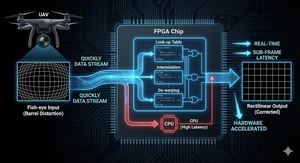

1. [High Priority]Research on Real-Time Fisheye Image Correction on Embedded FPGA for Robotic Vision
[BA/SA/MA]:[Proposal] (contact: qian.huang@tum.de)
This project is at the exciting intersection of robotics, computer vision, and high-performance computing. We aim to solve a critical challenge for autonomous systems: correcting severe fisheye camera distortion in real-time. Using Verilog and FPGA technology, you will develop a hardware-accelerated system that "flattens" distorted video streams instantly, a vital function for enabling robots and drones to accurately perceive and navigate their world.
2. [High Priority]Research on Low-Latency Hardware Acceleration of Reinforcement Learning Inference for Robotic Control
[BA/SA/MA]: (contact: qian.huang@tum.de)
Modern robotic control is increasingly driven by complex decision-making algorithms, with Deep Reinforcement Learning (RL) emerging as a powerful tool for enabling autonomous behavior. However, the computational demand of these sophisticated RL policies (deep neural networks) presents a significant bottleneck. For a robot to interact dynamically and safely with the real world—such as a robotic arm performing high-speed grasping or a legged robot maintaining balance—control decisions must be made in microseconds, not milliseconds. This project tackles this "action-latency" gap. We will explore the hardware acceleration of RL inference directly on an FPGA.
The goal is to design a bespoke, power-efficient, and massively parallel processing engine tailored specifically for an RL policy. Unlike a general-purpose GPU, an FPGA allows us to create a custom dataflow architecture that minimizes every nanosecond of delay. You will be responsible for profiling RL models, designing a streaming-based hardware architecture (e.g., using Verilog or HLS), and implementing a complete system that can run an RL policy at extreme speeds.
Mentor: Qian Huang
CeCaS: Autonomous driving - Systems and Software Engineering
As part of the research project CeCaS, a group has come up to build a new system architecture for future vehicles
with a focus on autonomous driving.
Systems and Software Engineering

Our group provides a range of topics related to systems and software engineering with applications in robotics and automotive.
Currently, the following thesis proposals are open:
- [SA/MA/BA] Designing an Amphibious Vehicle: A Prototype Trial Using 3D Printing.
- [SA/MA] 3DGS-based SLAM in Dynamic Systems: Improving Dynamic Object Filtering and Efficiency.
- [SA/MA] 6-DOF Grasp Planning using Transformer-based Neural Networks.
- [MA] Performance study on transporting large-scale dataset.
- [MA] Multi-robot cooperation under signal temporal logic
- [SA/MA]Field Robotics -Autonomous Driving in Unstrutured Scenarios
- [SA/MA]Field Robotics-Autonomous Driving in Smart Mining
Reinforcement Learning, Representation Learning, Meta-RL and Robotics
Three of our DEMOs can be found at https://sites.google.com/view/kuka-environment/ , https://sites.google.com/view/cemrl, and https://videoviewsite.wixsite.com/rlsnake.
- Meta-RL:
- RL:
- Language-conditioned Meta-RL:
- Safety Control for Robotic Manipulator
We have several other open topics in the domain of reinforcement learning in robotics and we also accept open proposals or ideas with yourselves. For more information, please contact Zhenshan Bing.
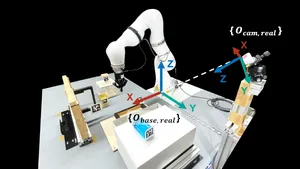
Simulation-Based Learning Control for Real-World Robotic Manipulation and Navigation

- [MA/GR/IDP] Reinforcement Learning for Tower Crane 3D Lift Control contact: Hossein Malmir
- [BA/MA/GR/IDP] Photorealistic Rendering and Simulation in Robotics with Unity contact: Josip Josifovski
- [BA/MA/GR/IDP] Comparative Sim2Real Path Planning for AGV Navigation contact: Hossein Malmir
For more information about other available topics in reinforcement learning, data-driven control, and sim2real transfer, please contact Hossein Malmir.
Embodied AI
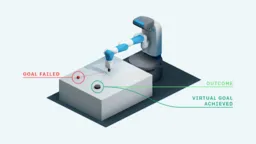
1. Lifelong Learning in Embodied AI
The demo and recent publication on Nature Machine Intelligence related to this topic can be seen at: https://www.nature.com/articles/s42256-025-00983-2
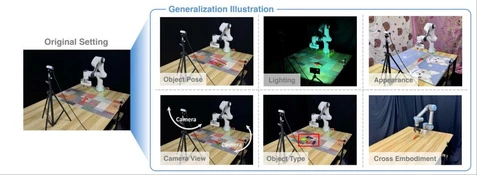
[BA/MA]: Cross-embodiment lifelong learning leveraging common knowledge representation and continual world model Robotic Lifelong Reinforcement Learning(contact: y.meng@tum.de)
In the process of lifelong learning for robots, cross-embodiment knowledge transfer and reuse are often overlooked. This leads to overfitting to specific dynamic embodiments and a lack of generalization. However, embodiments with similar dynamic characteristics hold the potential for direct task knowledge transfer and generalization. Therefore, this project focuses on cross-embodiment knowledge co-representation and transfer during lifelong learning. We propose to use a Mixture of Experts (MoE) architecture to align the inputs and outputs of different embodiments and to construct a shared representation in the latent space. At the same time, we will incorporate a world model to enable the latent space to predict states independent of specific dynamics, aiming to improve the cross-embodiment transfer performance in lifelong learning.
Keywords: Lifelong Reinforcement Learning, Cross-Embodiment, Shared Latent Representation, Transformer, Mixtrue of Experts, Generative Experience Replay, Diffusion Modeling
2. Inference Reuse for Meta-Reinforcement Learning
[BA/MA]: Enhancing inference reuse in meta reinforcement learning for non-parametric task distributions (contact: y.meng@tum.de)
This thesis project aims to advance current research in inference-based Meta Reinforcement Learning (MRL) by optimizing algorithmic frameworks for inference reuse and extending the agent’s meta-knowledge generalization capabilities to non-parametric task distributions. The work will focus on enhancing existing methods, developing novel optimization strategies, and conducting comprehensive experimental evaluations across diverse simulated tasks. Opportunities for transfer to real-world robotic platforms may also be explored.
Keywords: Meta-inference Reutilization, Meta Reinforcement Learning, Long-Short Term Memory, Soft-Actor-Critic, Latent Representation, Bayesian Non-parametric Clustering
3. Large Language Models (LLMs) empowered Robotic Manipulation
[BA/MA]: Robotic long-horizon manipulation based on code retrieval argumented generation (contact: y.meng@tum.de)
With the powerful coding capabilities of large language models, it has become possible to deploy robots directly into task environments without any training. However, large language models are constrained by their context window, making prompt iteration during tasks prone to catastrophic forgetting. Therefore, it is necessary to modularize and store robot behaviors as skills, and to leverage external memory for retrieval and generation of code adapted to new tasks. This project focuses on how to further improve the retrieval efficiency and accuracy of the robot’s external skill library using state-of-the-art Retrieval-Augmented Generation (RAG) methods, with the goal of enhancing the robot’s generalization performance and adaptability to dynamic environments.
Keywords: Large Language Models, Robotic Long-horizon Manipulation, Retrieval Argumented Generation.
4. Multitask Reinforcement Learning on Realworld Quadrupeds Locomotion
[BA/MA]: Multitask reiforcement learning based on MoE and Bayesian non-parametric representation space (contact: y.meng@tum.de)
Multi-task learning for quadrupeds requires the policy to infer task-specific features from observations during inference and execute the corresponding correct actions. Previous locomotion policies for quadrupeds have mostly focused on narrow task distributions, often requiring training from scratch when faced with new tasks, which severely limits their generalization capability. Therefore, this project focuses on enhancing the multi-task locomotion performance of quadruped robots by leveraging Mixture of Experts (MoE) and non-parametric task representations.
Keywords: Multitask Reinforcement Learning, Quadrupeds Locomotion, Long-Short Term Memory, Soft-Actor-Critic, Latent Representation, Bayesian Non-parametric Clustering
Applicants interest in above topics are expected to have
- Proficiency in Python and a solid understanding of deep learning (e.g., completion of the “introduction to deep learning (IN2346)”).
- Familiarity with Linux OS and/or ROS (Robot Operating System).
- A good academic performance (GPA < 2.3) is mandatory.
- Availability for full-time work (at least 6 months).
- Prior experience with reinforcement learning/ imitation learning is highly desirable and will be considered an advantage.
Additionally, we have several ongoing projects and we also accept open proposals or ideas with yourselves. We welcome interested students to reach out at any time: Yuan Meng
Model Predictive Control for Quadruped Robots

Neural SLAM and Biomimetic Rodent Robot

- [MA/BA] Design and Control of a Rat Robot with Actuated Spine and Ribs
- [MA/BA] Biologically Plausible Spatial Navigation (NeuralSLAM)
- [MA/BA] Brain-inspired Localization and Mapping based on LiDAR Sensor
- [MA/BA] Pathological gait generation for rat robot with spine-based damage control
- [MA/BA] Rewiring the CPG controller during rat robot error behaviors
For more information about this topic, please contact Zhenshan Bing and Florian Walter.
BMW - Source-Agnostic Cooperative Perception
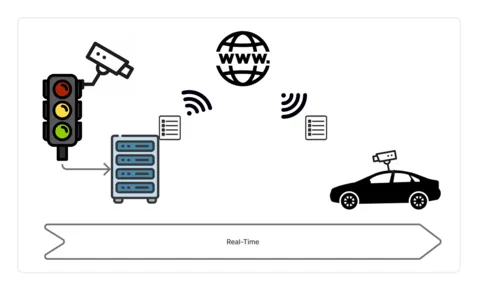
As part of the research project from BMW, our focus is on the real-time infrastructure of the V2X communication and sensor fusion.
- [MA/FP] Efficient Real Time V2X Data Transmission and Object Extraction
- [MA/FP] Object List Generation and Extraction for V2X Communication
For more information about this topic, please contact Kuo-Yi Chao.
KI.FABRIK: Future AI & Robotic Factory

1. Dual/Multi-Robot Collaboration for Cable Manipulation:
- Motion Planning and Collision Avoidance in Dual-arm Manipulation of Deformable Linear Objects
- Contact Estimation through Sensor Fusion
- [New!] Dexterous Teleoperation for Imitation Learning
- [New!] Learning LLM-based Task Planning for Multi-stage Manipulation
2. Path Planning:
- Path Planning Algorithms via Open Motion Planning Library (OMPL)
- DARKO - Mobile Robot Manipulator Simulation and Trajectory Planning
- Visualization of the mobile robot manipulator for the DARKO project
3. Obstacle Avoidance:
- Algorithms for Multiple Dynamic/Static Obstacle Avoidance
- Obstacle Avoidance Algorithms for Robotic Manipulators in Multi-Obstacle Environment
4. Knowledge Graphs with Foundation Models
5. Dynamics Learning:
6. Image-Goal Navigation in Unstructured Environments (Underwater) via Deep Reinforcement Learning
7. Diffusion Policy on Dynamic Scenarios:
8. Robot Learning for Manipulation:
- [New! MA/FP] Active Perception based Robot Manipulation
- Fine-Tuning a Robot Foundation Model for Contact-rich Manipulation
- [New! FP] Reinforcement Learning based framework for contact rich manipulation of a musculoskeletal hand model
HAL4SDV - Systems Safety Security Software
HAL4SDV, or the Hardware Abstraction Layer for Software-Defined Vehicles, is a European research initiative aimed at revolutionizing the automotive industry by developing a standardized hardware-software integration framework.
This project supports the transition to Software-Defined Vehicles (SDVs), where software plays a central role in vehicle functionality, allowing for over-the-air updates, modular design, and enhanced customization.
Key goals of HAL4SDV include:
- Creating a unified interface between vehicle hardware and software to simplify development processes.
- Enabling faster deployment of new features and ensuring high safety and performance standards.
- Supporting both safety-critical and general-purpose vehicle applications.
- Enhancing collaboration across European countries to build a comprehensive SDV ecosystem.
We are looking for eager and motivated students to work on the following topics:
Application of Retrieval-Augmented Generation (RAG) Systems in Standard Compliance
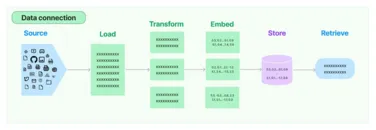
We are looking for a self-motivated student to work on extracting test scenario for autonomous driving research using RAG system:
- [GR/FP/IDP/SA/BA/MA/etc.] Comparison of Retrieval-Augmented Generation (RAG) Systems for Extracting Test Scenarios from UN Regulations
We have other open topics in the domain of Large Language Models in autonomous driving software development and we also accept open proposals or ideas with yourselves. For more information, please contact Vahid Zolfaghari.
Spiking Neural Networks - Next Generation AI for Autonomous Driving

At the KI-ASIC project we are researching about the application of bio-inspired neural networks to real-world applications.
If you are interested in learning about neuroscience and how neuromorphic engineering is trying to narrow the gap between biology an technology, do not hesitate to contact us.
Available:
Previous topics:
Reinforcement Learning with Diffusion Models
There are a few simulation oriented Bachelor and Master thesis in the following topics. If you are interested, feel free to contact us at erdi.sayar(at)tum.de
Cyber-Physical Systems

Cyber-physical systems — physical devices, enhanced by computational algorithms, that interact with their environment — are pervasive in today's society. Applications include autonomous driving, surgical robots, power grids, space exploration, and many more. All these use cases are safety-critical, as failures can cause severe economic and ecologic damages. At the Cyber Physical Systems Group, we develop methods to provably guarantee safe operation of these systems during deployment. We offer thesis topics in the following areas:
- Autonomous Vehicles
- Modular Robotics
- Safe & Multi-Agent & Offline Reinforcement Learning
- Robust and Nonlinear Motion Planning & Control
- Machine Learning and Optimization
- Formal Methods and Reachability Analysis
- Mobile Robotics for Construction Tasks
Please check our website for an up-to-date list of open topics.
Deep Learning for Computer Vision

If you are interested in researching trending topics in the field of computer vision and pattern recognition:
- Object detection
- Segmentation
- Tracking
- Surface reconstruction
- Mesh generation
- Text-to-image generation
- Domain adaptation of synthetic data
then please contact: Bare Luka Žagar
Formal Methods and Reachability Analysis
- [BA or MA] Data-driven Identification of Uncertainty Sets for Autonomous Systems
- [BA or MA] Uniform Trajectory Planning for Cyber-Physical Systems
- [BA or MA] Optimization-based Verification of Cyber-Physical Systems
- [MA] Ensuring Safety of Large-Scale Structures
- [MA] Exploiting Mixed-Monotonicity in Reachability Analysis
- [MA] Errors of Trajectories for Autonomous Vehicles and Cyber-Physical Systems
Offline Reinforcement Learning
Safe Reinforcement Learning, Multi-Agent Reinforcement Learning
Reinforcement Learning for Safe and Efficient Combustion Engine Control
Neurorobotics in the Human Brain Project
- Developmental Body Modeling in Soft Robotics
- Cloud-Based Robotics for Machine Learning
- Virtual Neurorobotics with Intel Loihi
- Spiking Compliant Robot Control with Intel Loihi
- Integration of the Neural Simulator NEST into the Neurorobotics Platform
- Deep Spiking Q-Networks
- Autonomous Locomotion Control for Snake Robot Based on Bio inspired Vision Sensor and Spiking Neural Network
- Advanced Autonomous Driving Control Based on Bio inspired Vision Sensor and Spiking Neural Network
- Spiking Neural Network for Autonomous Navigation based on LiDAR Sensor
- Deep Spiking Reinforcement Learning
- Learning adaptive target reaching with Recurrent Neural Networks
- Biologically-inspired Perception for Autonomous Vehicles based on LiDAR Sensor
Machine Learning Algorithms for Hybrid Vehicle Data
Please see this page for the available topics about 3D Object Detection and Tracking.
Autonomous Robot & Visual Servo & Deep Learning & Robot Design & Medical Robotics
For more information, please visit my homepage Mingchuan Zhou or contact me via email (zhoum@in.tum.de).
OSBORNE (Future Automotive E/E Architectures for Autonomous Cars)
We have a set of open topics in the domain of affective computing and multimodal emotion recognition, within the context of OSBORNE project, for more information please contact Sina.
HORSE / REMODEL
We have several open topics related to computer vision in the HORSE and REMODEL projects. Please contact Arne for more details.
Collaboration with Chair for Product Development and Lightweight Design
External thesis proposals
- Masterthesis – Grey-Box Modellierung und Validierung des Motoraufheizverhaltens auf dem Rollenprüfstand und im Fahrzeug mittels Machine Learning
- [Master Thesis or Working Student] LLM for robotics with multi-fingered hand (Agile Robots AG)
Robot learning for Dexterous Hands
Sim2real transfer with Scaling up Diffusion/Flow matching Policies for Dexterous Manipulation
Low-level vision
For more information, please visit my homepage (Yuning Cui) or contact me via email (yuning.cui@in.tum.de).