Open Student Thesis Offers
When writing your thesis at TUM I6, please follow our thesis guidelines. A guide to writing good thesis can be found here. A collection of useful material for research can be found here.

Realizing Natural Language Scenario Descriptions in CARLA Using Large Language Models
We are looking for a self-motivated student to work on Code generation for Carla using Large Language Models:
AUTOtech.agil - Future of Autonomous Driving and Intelligent Traffic Infrastructure

- [MA/GR/BA] Visual Language Model in Autonomous Driving
- [MA/GR/BA] Domain Adaptation of Synthetic Data for 3D Traffic Environment Perception
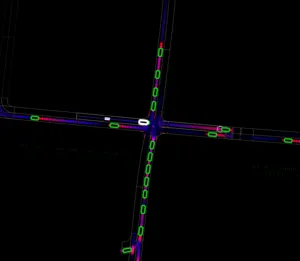
- Real-Time and Robust 3D Object Detection on the Autonomous Driving Test Stretch Using LiDAR Point Cloud Data
For more information about this topic, please contact Xingcheng Zhou.
CeCaS: Autonomous driving - Systems and Software Engineering
As part of the research project CeCaS, a group has come up to build a new system architecture for future vehicles
with a focus on autonomous driving.
Reinforcement Learning, Representation Learning, Meta-RL and Robotics
Three of our DEMOs can be found at https://sites.google.com/view/kuka-environment/ , https://sites.google.com/view/cemrl, and https://videoviewsite.wixsite.com/rlsnake.
- Meta-RL:
- RL:
- Language-conditioned Meta-RL:
- Safety Control for Robotic Manipulator
We have several other open topics in the domain of reinforcement learning in robotics and we also accept open proposals or ideas with yourselves. For more information, please contact Zhenshan Bing.
Model Predictive Control for Quadruped Robots

Whisker-Inspired Tactile Sensor and Biomimetic Rodent Robot

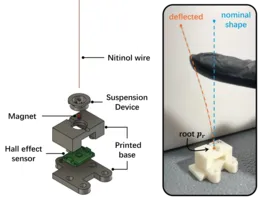

We aim to build a flexiable, light-weight tactile sensor based on the biological structure of rodent's vibrissae, and apply them on the robot arm, biomimetic rodent robot and other platform to provide perception and self-estimate ability.
Sensor Design and Contact Estimate:
- [MA|SA|BA] Dynamic Contact Estimate along A Whisker-inspired Tactile Sensor.
- [MA|SA|BA] Reconstruction of Contacts in Search Space from A Whisker Sensor Array.
Others:
- [MA|SA|BA] Contour Reconstruction on Unstructured Environments via Active Tactile Sensing
- [MA|SA|BA] Tactile SLAM and Bio-inspired Navigation based on Whisker Sensor for Rodent Robot
For more information about this topic, please contact Yixuan Dang.
Autonomous Driving, Robotic Grasping, and Dense Prediction (Seeking outstanding students all the time!)
The general research focus is as follows:
- [GR/FP/IDP/SA/BA/MA/etc.] Topic 1: Vision language model for robotic grasp pose estimation (2D planar and 6D).
- [GR/FP/IDP/SA/BA/MA/etc.] Topic 2: Object detection and semantic segmentation for autonomous driving.
- [GR/FP/IDP/SA/BA/MA/etc.] Topic 3: Autonomous driving perception based on adverse weather image restoration.
- [GR/FP/IDP/SA/BA/MA/etc.] Topic 4: Multi-modal or multi-sensor fusion for robust object perception (2D/3D detection, segmentation, depth estimation, end-to-end autonomous driving, etc.).
- [GR/FP/IDP/SA/BA/MA/etc.] Topic 5: Correspondence-based pose estimation / simultaneous pose and correspondence registration (SPCR) (2D-3D / 3D-3D registration or globally optimal algorithms).
- [GR/FP/IDP/SA/BA/MA/etc.] Topic 6: Large language model (LLM) and vision language model (VLM) for robotics (autonomous driving or robotic grasping).
- [GR/FP/IDP/SA/BA/MA/etc.] Topic 7: Medical image segmentation.
I am also looking for highly self-motivated students to work on risk-based safety model for autonomous driving research. The topics include:
- [GR/FP/IDP/SA/BA/MA/etc.] Topic 1: LLM for safety-critical scenario generation for autonomous driving.
- [GR/FP/IDP/SA/BA/MA/etc.] Topic 2: Risk quantification estimation( Responsibility Sensitive Safety (RSS), Safety Force Field (SFF), etc.).
- [GR/FP/IDP/SA/BA/MA/etc.] Topic 3: Uncertainty estimation for autonomous driving perception (such as bayesian neural network).
- [GR/FP/IDP/SA/BA/MA/etc.] Topic 4: BEV-based detection and map segmentation.
- [GR/FP/IDP/SA/BA/MA/etc.] Topic 5: Behavioral intention prediction in driving scenes (Trajectory prediction, Behavioral intention prediction (BIP), BIP-aware trajectory prediction, etc.).
If you are interested in these research topics, please send me an email with your CV and transcript of records. We also have several other open topics in robotics and welcome proposals or ideas from your side. For more information, please contact Dr. rer. nat. Hu Cao.

Systems and Software Engineering

Our group provides a range of topics related to systems and software engineering with applications in robotics and automotive.
Currently, the following thesis proposals are open:
- [SA/MA/BA] Designing an Amphibious Vehicle: A Prototype Trial Using 3D Printing.
- [SA/MA] 3DGS-based SLAM in Dynamic Systems: Improving Dynamic Object Filtering and Efficiency.
- [SA/MA] 6-DOF Grasp Planning using Transformer-based Neural Networks.
- [MA] Performance study on transporting large-scale dataset.
- [MA] Automated Design Space Exploration for Automotive Resource Allocation
- [MA] Exploring in-vehicle TIme-Sensitive Network scheduling based on formal requirements
- [MA] Multi-robot cooperation under signal temporal logic
Neural SLAM and Biomimetic Rodent Robot

- [MA/BA] Design and Control of a Rat Robot with Actuated Spine and Ribs
- [MA/BA] Biologically Plausible Spatial Navigation (NeuralSLAM)
- [MA/BA] Brain-inspired Localization and Mapping based on LiDAR Sensor
- [MA/BA] Pathological gait generation for rat robot with spine-based damage control
- [MA/BA] Rewiring the CPG controller during rat robot error behaviors
For more information about this topic, please contact Zhenshan Bing and Florian Walter.
Embodied AI and Foundation Model

BMW - Source-Agnostic Cooperative Perception
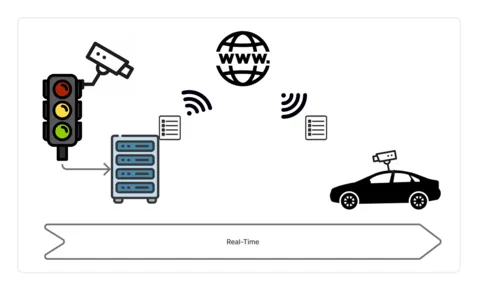
As part of the research project from BMW, our focus is on the real-time infrastructure of the V2X communication and sensor fusion.
- [MA/FP] Efficient Real Time V2X Data Transmission and Object Extraction
- [MA/FP] Object List Generation and Extraction for V2X Communication
For more information about this topic, please contact Kuo-Yi Chao.
KI.FABRIK: Future AI & Robotic Factory

1. Dual/Multi-Robot Collaboration for Cable Manipulation:
- Motion Planning and Collision Avoidance in Dual-arm Manipulation of Deformable Linear Objects
- Contact Estimation through Sensor Fusion
- [New!] Dexterous Teleoperation for Imitation Learning
- [New!] Learning LLM-based Task Planning for Multi-stage Manipulation
2. Path Planning:
- Path Planning Algorithms via Open Motion Planning Library (OMPL)
- DARKO - Mobile Robot Manipulator Simulation and Trajectory Planning
- Visualization of the mobile robot manipulator for the DARKO project
3. Obstacle Avoidance:
- Algorithms for Multiple Dynamic/Static Obstacle Avoidance
- Obstacle Avoidance Algorithms for Robotic Manipulators in Multi-Obstacle Environment
4. Visual Servoing Control:
5. Knowledge Graphs with Foundation Models
6. Dynamics Learning:
7. Underwater Salient Object Detection:
8. Shared Autonomy based Teleoperation for Tight-Clearance
DeepSLAM: Deep Learning based Localization and Mapping (Vision-based Perception and Navigation)
HAL4SDV - Systems Safety Security Software
HAL4SDV, or the Hardware Abstraction Layer for Software-Defined Vehicles, is a European research initiative aimed at revolutionizing the automotive industry by developing a standardized hardware-software integration framework.
This project supports the transition to Software-Defined Vehicles (SDVs), where software plays a central role in vehicle functionality, allowing for over-the-air updates, modular design, and enhanced customization.
Key goals of HAL4SDV include:
- Creating a unified interface between vehicle hardware and software to simplify development processes.
- Enabling faster deployment of new features and ensuring high safety and performance standards.
- Supporting both safety-critical and general-purpose vehicle applications.
- Enhancing collaboration across European countries to build a comprehensive SDV ecosystem.
We are looking for eager and motivated students to work on the following topics:
Application of Retrieval-Augmented Generation (RAG) Systems in Standard Compliance
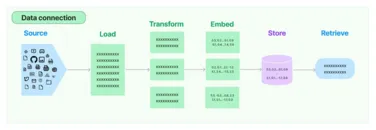
We are looking for a self-motivated student to work on extracting test scenario for autonomous driving research using RAG system:
- [GR/FP/IDP/SA/BA/MA/etc.] Comparison of Retrieval-Augmented Generation (RAG) Systems for Extracting Test Scenarios from UN Regulations
We have other open topics in the domain of Large Language Models in autonomous driving software development and we also accept open proposals or ideas with yourselves. For more information, please contact Vahid Zolfaghari.
Spiking Neural Networks - Next Generation AI for Autonomous Driving

At the KI-ASIC project we are researching about the application of bio-inspired neural networks to real-world applications.
If you are interested in learning about neuroscience and how neuromorphic engineering is trying to narrow the gap between biology an technology, do not hesitate to contact us.
Available:
Previous topics:
Simulation-Based Learning Control for Real-World Robotic Manipulation and Navigation

- [BA/MA/GR/IDP] Photorealistic Rendering and Simulation in Robotics with Unity contact: Josip Josifovski
For more information about other available topics in reinforcement learning, data-driven control and sim2real transfer, please contact Hossein Malmir.
Autonomous Vehicles
The Cyber Physical Systems group is pursuing a wide range of research directions related to safe decision making, motion planning and control for autonomous vehicles, involving both formal methods, sampling- and optimization-based methods as well as deep learning-based methods.
Currently, the following thesis proposals are open:
- [MA] Real-time Motion Planning for Autonomous Driving
- [GR/MA] Learning Model Predictive Robustness of Probabilistic Signal Temporal Logic
- [BA/MA] Encoding the Future: Deep Representations for Traffic using Graph Neural Networks
- [BA/MA] Learning Isometric Embeddings of Road Networks using Multidimensional Scaling
- [MA] Deep Multi-Step Planning for Autonomous Driving
- [MA] Graph Neural Networks for Deep Behavior Prediction in Traffic Scenes
- [MA/SA] Development of a Negotiation Algorithm for Multi-Agent Driving in the Context of Falsification
- [MA] Learning Driving Corridor Cost Functions Using Inverse Reinforcement Learning
Safe Reinforcement Learning in Single Robot and Multi-Robot Systems

- [MA/BA] Safe Massively Multi-Agent Reinforcement Learning
- [MA/BA] Multi-Robot Manipulation and Navigation with Safe Multi-Agent Reinforcement Learning
We have several topics about Reinforcement Learning, Robotics, Autonomous Driving and AI Safety, for more information, please contact Shangding Gu (Remote).
Safe Reinforcement Learning in Robotics
Currently open positions:
Additionally, we will have open topics in safe reinforcement learning for manipulators and mobile platforms in the future.
If you are interested in these topics, you can contact: jakob (dot) thumm (at) tum.de
Modular Robotics

For interest in a BA/MA thesis in machine learning for modular robotics, please contact Jonathan Kuelz or Julian Balletshofer.
Currently open:
Robust and Nonlinear Motion Planning & Control
Deep Learning for Computer Vision

If you are interested in researching trending topics in the field of computer vision and pattern recognition:
- Object detection
- Segmentation
- Tracking
- Surface reconstruction
- Mesh generation
- Text-to-image generation
- Domain adaptation of synthetic data
then please contact: Bare Luka Žagar
Formal Methods and Reachability Analysis
- [BA or MA] Data-driven Identification of Uncertainty Sets for Autonomous Systems
- [BA or MA] Uniform Trajectory Planning for Cyber-Physical Systems
- [BA or MA] Optimization-based Verification of Cyber-Physical Systems
- [MA] Ensuring Safety of Large-Scale Structures
- [MA] Exploiting Mixed-Monotonicity in Reachability Analysis
- [MA] Errors of Trajectories for Autonomous Vehicles and Cyber-Physical Systems
Offline Reinforcement Learning
Safe Reinforcement Learning, Multi-Agent Reinforcement Learning
Reinforcement Learning for Safe and Efficient Combustion Engine Control
Neurorobotics in the Human Brain Project
- Developmental Body Modeling in Soft Robotics
- Cloud-Based Robotics for Machine Learning
- Virtual Neurorobotics with Intel Loihi
- Spiking Compliant Robot Control with Intel Loihi
- Integration of the Neural Simulator NEST into the Neurorobotics Platform
- Deep Spiking Q-Networks
- Autonomous Locomotion Control for Snake Robot Based on Bio inspired Vision Sensor and Spiking Neural Network
- Advanced Autonomous Driving Control Based on Bio inspired Vision Sensor and Spiking Neural Network
- Spiking Neural Network for Autonomous Navigation based on LiDAR Sensor
- Deep Spiking Reinforcement Learning
- Learning adaptive target reaching with Recurrent Neural Networks
- Biologically-inspired Perception for Autonomous Vehicles based on LiDAR Sensor
Machine Learning Algorithms for Hybrid Vehicle Data
Please see this page for the available topics about 3D Object Detection and Tracking.
Autonomous Robot & Visual Servo & Deep Learning & Robot Design & Medical Robotics
For more information, please visit my homepage Mingchuan Zhou or contact me via email (zhoum@in.tum.de).
OSBORNE (Future Automotive E/E Architectures for Autonomous Cars)
We have a set of open topics in the domain of affective computing and multimodal emotion recognition, within the context of OSBORNE project, for more information please contact Sina.
HORSE / REMODEL
We have several open topics related to computer vision in the HORSE and REMODEL projects. Please contact Arne for more details.
Collaboration with Chair for Product Development and Lightweight Design
External thesis proposals
- Masterthesis – Grey-Box Modellierung und Validierung des Motoraufheizverhaltens auf dem Rollenprüfstand und im Fahrzeug mittels Machine Learning
- [Master Thesis or Working Student] LLM for robotics with multi-fingered hand (Agile Robots AG)
Low-level vision
For more information, please visit my homepage (Yuning Cui) or contact me via email (yuning.cui@in.tum.de).