Theses on Virtual Fixture Learning
Virtual Fixtures are an important tool in teleoperation, supporting the human operator with haptic aids to perform challenging tasks in a remote environment. One of the most challenging tasks is manufacturing in Space as explored in the ACOR project. Virtual Fixture methods realized as part of a thesis have a high potential of being evaluated in space in the near future.
Programming Virtual Fixtures is however challenging and requires expert knowledge to create a suitable haptic guidance. Learning Methods can be used on various levels to enable non-experts to program and tune Virtual Fixtures and to simplify fixture creation also for expert users. There are two thesis topics available exploring various elements of learning such fixtures, please see below for a detailed description. Those theses will be conducted in collaboration with the Institute of Robotics and Mechatronics of the German Aerospace Center (DLR). Please do not hesitate to also contact us with your own thesis ideas.
Mixture of Experts Fixture Learning
Static Virtual Fixtures defined in position space are often not flexible enough for dynamic environments or tasks requiring high precision. Using visual input allows to dynamically update Virtual Fixture positions in real time as well as adding and removing fixtures based on detected targets.
Newly developed Probabilistic Visual Servoing Fixtures based on a Mixture of Experts (MoE) formulation allow for a principled way to define and arbitrate between fixtures based on such perceptual input. Their formulation however currently requires manual tuning of hyperparameters which prevents non-expert users from using this method. The goal of this thesis is to develop a method for demonstration-guided programming of the fixture parameters.
Tasks
- Literature research on learning-based approaches for the Mixture of Experts gating function,
- integration of a vision-based tracking system for obtaining target poses,
- estimation of the MoE hyperparameters using Maximum Likelihood estimation,
- extension of the method by e.g. smoothing transitions, learning dead zones and parameter ranges,
- evaluation of the method.
Qualification
- Good knowledge about foundations of robotics (Rigid body transformations, kinematics, etc.)
- Good knowledge of Probabilistic Machine Learning methods
- Strong programming skills in Python 3 and C++
- Familiar with development on Linux operating systems
- Experience with Git, CI/CD pipelines
Please contact us for more details.
Supervision: M.Sc. Maximilian Mühlbauer (TUM) - maximilian.muehlbauer@tum.de, +49 8153 28 4788
Learning-based Adaptation of Virtual Fixtures
Position-based fixtures are often learned once based on a training dataset. Task-parametrized models allow to adapt such fixtures based on coordinate frames, thus adding flexibility to the otherwise static fixture formulation. For environments that are changing in more diverse ways this might not be enough - obstacles might appear in places not modelled before or objects to interact with could change.
Recently, methods have been developed to allow for an adaptation of probabilistically defined trajectories. This formulation can also be used to adapt Virtual Fixtures, where force feedback from the unmodified Virtual Fixture can offer additional cues for the operator. Goal of this thesis is to develop a method that can both interactively and from known collision geometries adapt Virtual Fixtures in a probabilistic framework.
Tasks
- Literature research on learning-based adaptation of Virtual Fixtures,
- development of a probabilistic fixture adaptation approach,
- integration of the approach into the existing teleoperation framework,
- extension of the method by e.g. adaptive scaling of Virtual Fixture forces during the adaptation phase,
- evaluation of the method.
Qualification
- Good knowledge about foundations of robotics (Rigid body transformations, kinematics, etc.)
- Good knowledge of Probabilistic Machine Learning methods
- Strong programming skills in Python 3 and C++
- Familiar with development on Linux operating systems
- Experience with Git, CI/CD pipelines
Please contact us for more details.
Supervision: M.Sc. Maximilian Mühlbauer (TUM) - maximilian.muehlbauer@tum.de, +49 8153 28 4788
Theses on Nonlinear Vibrations and Elastic Robots Theses
Here we post potential theses in the field of nonlinear dynamics, elastic robots, (legged) locomotion and geometric dynamics.
Application of Nonlinear Normal Modes for Undulatory Locomotion

Nonlinear Normal Modes (NNM) for elastic multi-body systems and the related Eigenmanifold concepts are new theoretical tools with highly promising potential in the design and study of robotic and biological locomotion systems. Recently, the concept of NNM, formerly studied only for point masses connected by nonlinear springs, has been extended such that it applies also to the analysis of natural oscillations of complex robotic systems [1]. These nonlinear oscillations may be used to achieve efficient robot motion.
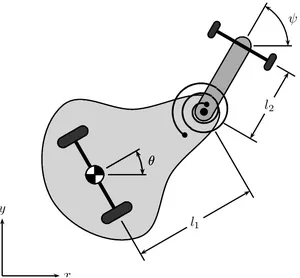
This master thesis will explore and evaluate the use of NNM-based locomotion patterns for undulatory motion, as encountered in snake or fish like robots [2]. Specifically, locomotion of an elastic Roller-Racer shall be considered. The Roller-Racer is a well-researched nonlinear dynamic system. Its undulating locomotion can be controlled with periodic joint trajectories [2]. The main goal of the thesis will be to investigate if these periodic joint trajectories can be embedded into the natural dynamics of an elastic roller racer, to improve its locomotion efficiency.
Tasks
- Analyze the systems NNM
- Optimize the system for locomotion with the NNM
- Design and implement control approach for exciting and stabilizing the locomotion
- Evaluate the locomotion efficiency in simulation
Qualifications
- Experience with nonlinear dynamics and/or differential geometry would be advantageous.
- Experience with MATLAB, and or Python
The work will be carried out at the Institute of Robotics and Mechatronics at the German Aerospace Center (DLR) in Oberpfaffenhofen.
Start
as soon as possible
References
- A. Albu-Schäffer, C. Della Santina: “A review on nonlinear modes in conservative mechanical systems”. Elsevier, Annual Reviews in Control, https://doi.org/10.1016/j.arcontrol.2020.10.002
- Bazzi, S., Shammas, E., Asmar, D. et al. Motion analysis of two-link nonholonomic swimmers. Nonlinear Dyn 89, 2739–2751 (2017).
- https://doi.org/10.1007/s11071-017-3622-y
Contact
Tristan Ehlert (tristan.ehlert(at)dlr.de), +49 8153 28-1123