Myoelectric Control Strategies

Andreas Heddergott/TUM
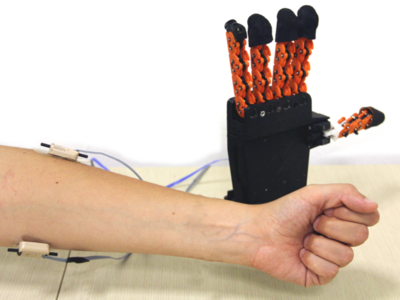
Picture from Piazza et al, ICRA 2016
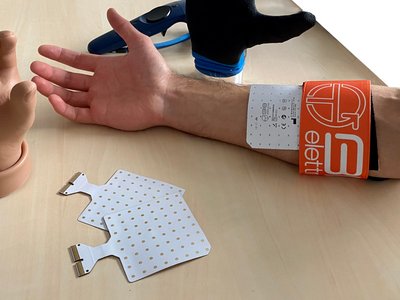
Picture from Maimeri et al, Frontiers 2019
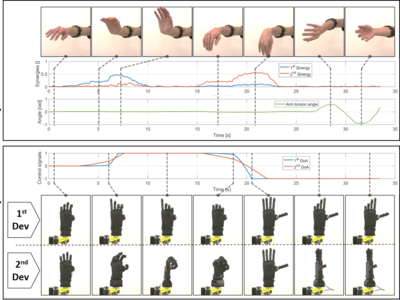
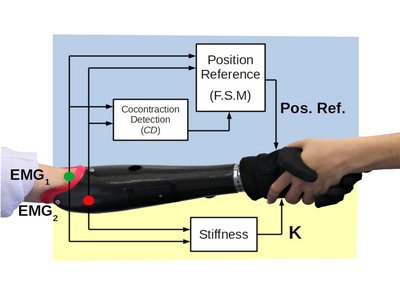
Picture from Capsi-Morales et al, Frontiers 2020
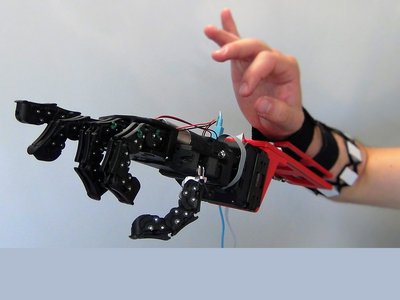
Picture from Capsi-Morales et al, Frontiers 2020
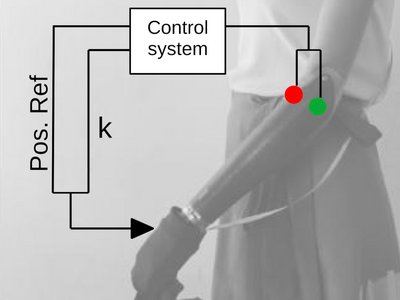
Picture from Rossi et al, ICORR 2017
Our lab is actively involved in developing novel myoelectric control strategies that can enhance the performance and functionality of upper limb prostheses. We use surface electromyography (sEMG) to detect the electrical signals generated by muscles during voluntary contractions, and use these signals to control the movement of the prosthetic hand.
Most commercial solutions used today in prosthetics are equipped with several degrees of actuations (DoA), controlled through switching techniques, as co-contractions, sequential activation, mechanical selectors, software applications for smart phones, just to cite a few. While effective in enabling the exploitation of a large number of actuators, these solutions are considered uncomfortable by many users, often leading to abandonment of the device. We aim to investigate and develop advanced control algorithms and strategies based on the use of multiple surface electromyographic (sEMG) sensors (e.g. high density sEMG sensors), which go beyond the conventional and state-of-the-art. Our research focuses on developing advanced signal processing algorithms that can accurately interpret the sEMG signals and translate them into intuitive hand movements.