Einführung
Ein speziell für den Einsatz im Fahrzeug eingerichtetes Usability Labor ist das Navigation-Lab. Für die Anwendung im Fahrzeug muß sichergestellt werden, daß z.B. das zu untersuchende Bedienkonzept und eingesetzte Erkennungstechnologien (Lichverhältnisse, Geräuschkulisse) auch automotivtauglich sind. Deshalb gibt es am Lehrstuhl einen Fahrsimulator, der die Aufmerksamkeit der Versuchspersonen von den zu testenden Bedienkonzepten zurück auf die Fahraufgabe lenkt um möglichst realistische Bedingungen zu schaffen.
Technik
Das Navigation-Labor besteht aus einem Fahrzeugraum und einem Regieraum.
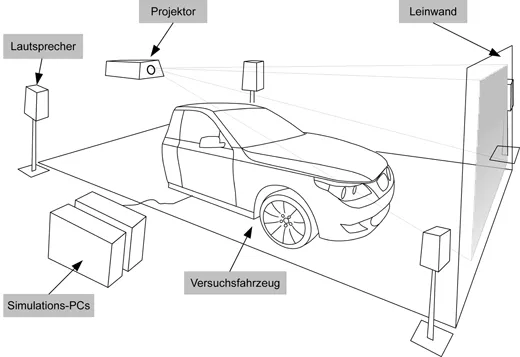
Im Fahrzeugraum befindet sich als Versuchsfahrzeug die vordere Hälfte eines BMW der aktuellen 5er Baureihe. Dieser ist mit einem Force-Feedback-Lenkrad für die Steuerung des Fahrzeugs in der Fahrsimulation, den entsprechenden Pedalen, Schaltern und Tiptronic-Schaltung, mehreren Displays für die Anzeige der Nutzeroberflächen (Kombiinstrument, zentrales Display - CID, Head-up Display - HUD), sowie Mikrophonen und Kameras ausgestattet.
Für verschiedenste Versuchsanforderungen und -aufbauten besteht die Möglichkeit weitere Eingabegeräte (z.B. Touchpad, Dreh-/Drücksteller, usw.), Touchscreens, kamerabasierte Messsysteme (z.B. Eye-/Gazetracking, Kopftracking, usw.) zu integrieren.

Über einen Beamer wird das Bild der Fahrsimulation auf die Wand vor dem Fahrzeug projiziert. Die Projektionsfläche hat hierbei eine Größe von ca. 4m * 3m. Aus Fahrersicht ist so der Rand der Projektion gerade noch zu sehen. Audiosignale - z.B. Motorengeräusche, Umgebungsgräusche, Hinweisetöne, usw. - können über eine leistungsstarke Surround-Sound Anlage sowie fahrzeugeigene Lautsprecher wiedergegeben werden.
Verwendete Simulationsumgebungen
Als Simulationssoftware kommen am Lehrstuhl entwicklete Simulationsplattformen sowie verschiedene kommerzielle Programme zum Einsatz.
- Lane Change Task
- MMK Fahrsimulation basierend auf Unreal Tournament UT2004
- MMK Fahrsimulation basierend auf 3DVIA Virtools für die CAVE, Powerwall, HMD, Desktop
Weiterhin wird aktuell eine neue Simulatorplattform entwicklet, welche es ermöglicht die Bilder der Simulation über Stereobeamer dreidimensinal zu projizieren. Mit Hilfe dieser Software ist es weiterhin möglich, die Sichtsimulation in der Lehrstuhl eigenen Virual Reality CAVE zu projezieren, um dem Probanden eine Rundumsicht zu präsentieren.

Unter folgendem Link kann ein Demovideo der CAVE basierten Fahrsimulation betrachtet werden. Zu sehen sind unter anderem einige Fahrszenen in der virtuellen Welt sowie Interaktionsvorgänge mit dem virtuellen Cockpit (z.B. Starten des Motors, Betätigen der Hupe sowie Anschalten und Bedienen des Radios).
Fahrsimulation auf Basis von Virtools
Aktuell wird eine neue Fahrsimulation mit dem VR-Tool Virtools aufgebaut. Sie kann sowohl in stereoskopisch in der CAVE mit teilweise virtuellem Cockpit oder im BMW-Cockpit mit monoskopischer Leinwandprojektion eingesetzt werden. Der Fremdverkehr wird durch die Verkehrssimulation SUMO in Echtzeit berechnet, wobei auch das Probandenfahrzeug in SUMO synchronisiert wird.

Die Szenerie kann entweder offline mit der CityEngine oder einem Terraingenerator für Überlandstrecken zur Laufzeit erzeugt werden. Dabei kann die CityEngine reale Straßennetze aus OpenStreetMap nutzen oder eigenständig generierte.


Der Sound wird mit der FMOD - Engine aus realen Audiosamples erzeugt. Zusätzlich werden Wind- und Rollgeräusche geschwindigkeitsabhängig addiert.
Versuchssteuerung
Der Regieraum dient dem Wizard oder Versuchsleiter zur Beobachtung. Von hier aus werden alle Geräte und der Fahrsimulator gesteuert. Die technische Ausstattung umfaßt mehrere Rechner (Fahrsimulation, Benutzungsoberfläche), Computer- und Videomonitore, Videomischpult, Videorekorder, Audiomischpult, Kompressoren und mehrere Audio-Endstufen.