Open PhD Positions
We are an interdisciplinary team at the Chair of Safety, Performance and Reliability for Learning Systems, and we are looking for three exceptional PhD candidates to join our team. The PhD positions will be full-time (100%, TV-L E13). We are committed to fostering a diverse and inclusive research environment, and we strongly encourage candidates from underrepresented groups to apply. The review process will begin on December 06, 2024 and continue until filled. Please refer to the "Application Procedure" section for details on how to apply (application form).
Current Openings
The following openings have also been announced on the official TUM job portal.
Position Posted on September 30, 2024
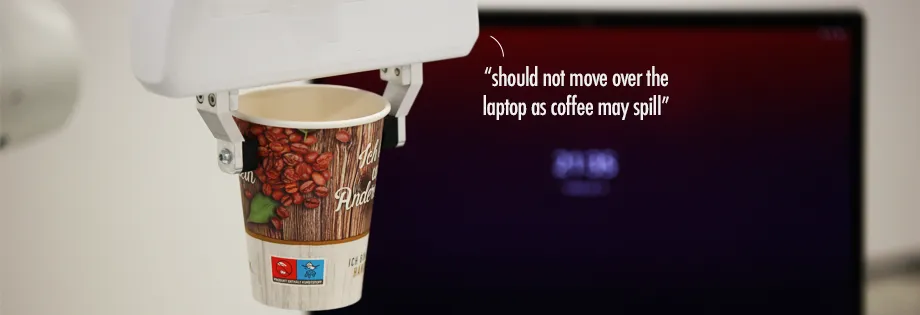
Our actions are guided by what we see and how we understand the world around us. While there have been significant advancements in interpreting images and other sensory data, these breakthroughs have not yet fully translated into robotics. The goal of this work is to harness semantic and contextual understanding to enable robots to make appropriate decisions.
There is a rich body of literature on safe robot decision-making, which focuses on ensuring that robots act within specific state and input constraints. However, when robots operate in real-world environments, these safety constraints need to be addressed through a semantic understanding of the environment. For example, a helper robot should avoid spilling water on electronic devices, bringing flammable products close to heat sources, or putting aluminum foil in the microwave. Recent advancements in machine learning and computer vision have allowed robots to gain this kind of semantic understanding through various sensory modalities, such as vision, language, and audio. However, translating this understanding and "common sense" into actionable constraints for robots is a non-trivial challenge. This thesis aims to bridge the gap between machine intelligence and safe control techniques, enabling robots to make decisions that are semantically informed. It will explore foundational models, language models, and control safety guarantees, with the goal of developing novel algorithms, theoretical advancements with provable guarantees, and real-world demonstrations.
Position Posted on September 30, 2024
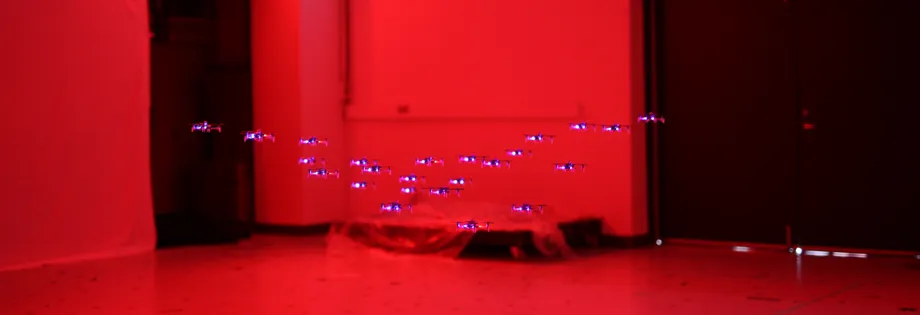
Aerial swarms have been gaining increasing attention for solving real-world problems due to their agility to navigate through complex environments and their capability to tackle complex tasks and scenarios that are otherwise infeasible for single agents. One of the fundamental challenges in this field is designing efficient planning and control strategies that enable safe and coordinated behaviour among swarm agents. The goal of this PhD is to advance safe multi-agent planning and control algorithms deployed in changing environments with an emphasis on reliable real-world deployment.
Existing literature can be broadly categorized into centralized and distributed approaches. Centralized methodologies are effective in generating optimal smooth coordinating trajectories but often suffer from scalability issues as swarm size increases. Distributed frameworks have emerged to circumvent these challenges. These works have shown improved scalability and efficiency in point-to-point transition tasks. In this thesis, the goal is to extend online distributed swarm trajectory optimization frameworks to enable (i) fast and agile flights and (ii) safe interactive flights. To accomplish this goal, learning-based methods are required to be integrated into the prior model-based frameworks. The developed algorithm is expected to be demonstrated in various applications (e.g., the SwarmGPT project).

Position Posted on September 30, 2024
Human operators are good at performing dexterous tasks, while robots can complete tasks in a consistent and predictable manner. Human-robot teams generally offer improved efficiency and reliability in construction. To best leverage the respective advantages of the human-robot team, it is essential to provide a means for humans and robots to interact in a natural and safe manner. The goal of this PhD work is to develop perception-based methods to seamlessly support human operators in cluttered and dynamic environments for collaborative manipulation. This project will be a part of the Innovation Network on Collaborative Construction, where interdisciplinary collaboration and real-world demonstration are expected.
Complex collaborative construction tasks can be naturally decomposed into smaller tasks with a given order of priority. The priority can be temporal (e.g., picking up an item from point A, and then moving to point B) or contextual (e.g., picking up a rod but giving priority to visually tracking an object of interest). These settings can be naturally represented as hierarchical planning and control problems. There is a rich set of literature on whole-body control approaches for mobile manipulators to excel in single tasks. In this topic, we aim to tackle the difficulties in solving vision-based hierarchical planning and control problems and develop an efficient optimization algorithm specialized for solving hierarchical mobile manipulation tasks in cluttered and dynamic environments. A further step of this project includes developing distributed decision-making approaches to coordinate heterogeneous robot teams, consisting of multiple mobile manipulators and aerial vehicles, for collaborative construction tasks.
Requirements
- Top-ranked Master's degree in robotics, computer vision, system control, machine learning, mathematics, or a related field (background in any of the following);
- Being excited to make a real impact with their thesis work in the field of robotics;
- Strong programming skills in C++ and/or Python, as well as experience in implementing robot learning algorithms;
- A strong background in control theory, machine learning, and/or computer vision;
- A proven track record demonstrating strong problem-solving skills and the ability to conduct independent research (e.g., through publications at top venues in robotics, computer vision, machine learning, or a relevant field);
- Excellent communication skills in English and ability to work in a dynamic team environment;
- Previous experience working with real robots is a plus.
If you do not satisfy all requirements but are very interested in the position, please feel free to apply and/or reach out to us for questions.
Application Procedure
Please submit your application package via the following link: http://tiny.cc/lsy-phd-applications. In the application form, you will be asked to submit a package that includes the following documents:
- A personal statement highlighting research interests and relevant experience;
- An academic CV including a full list of publications;
- Transcripts;
- Relevant certificates (e.g., university degrees, additional courses);
- Contact information of three referees;
- Any additional supporting documents you would like to share with us.
If you have any questions regarding the open positions or the application process, please contact us at contact.lsy(at)xcit.tum.de and ensure that the posting ID (e.g., "TUEILSY-PHD20240919-SSR") is indicated in the subject line.
Who We Are
The Learning Systems and Robotics Lab at the Technical University of Munich is led by Prof. Angela Schoellig. Our research is motivated by the vision of a seamless interaction of robotic systems with the physical world. In particular, our research interests are centred around the challenges associated with robots operating in increasingly unstructured, uncertain and changing environments, and over long periods of time. These situations challenge current robot designs, which rely on knowing the specifics of the environment and tasks ahead of time in order to operate safely and efficiently. We address this problem by drawing ideas from controls, machine learning and optimization. We believe that the next generation of robot algorithms will combine a-priori information about the robot and its environment with data collected during operation.
Our research projects fall into two categories:
- developing novel robot control and learning algorithms that enable single and multi-robot systems to operate safely and effectively in real-world application scenarios, and
- working in interdisciplinary teams on robot applications to various challenging problems.
Visit our research page (https://www.learnsyslab.org) to learn more about our latest work as well as academic and industry collaborations.
Benefits of Working with Us
- Leading lab in Safe Robot Decision-Making: Our lab has developed several advanced frameworks including Gaussian Process Model Predictive Control (GP-MPC) for safe learning from data, multi-robot transfer learning, and Bayesian-optimization-based safe learning, as well as distributed MPC (DMPC) and alternative minimization (AM) algorithms for swarm coordination.
- International Research Partnerships: We collaborate with top research institutions and labs worldwide. Our partners span across top-ranked universities such as MIT, ETH Zurich, the University of Toronto, and the TUM. We are also part of various networks, including the Robotic Institute Germany (where we take a leading role), the Konrad Zuse School of Excellence in reliable AI (relAI), the Munich Center for Machine Learning (MCML), and the Vector Institute for Artificial Intelligence.
- Industry Collaborations and Large-Scale Demonstrations: Our industry collaborations span across multiple sectors and extend to leading institutions across Europe, North America, and beyond. As a part of the collaborations, we have completed various large-scale demonstrations such as aerial vehicle testing in Africa, the USA, and Mexico, and deploying self-driving platforms in Arizona, Michigan, and the Canadian Space Agency’s Mars Emulation Terrain.
- International Recognitions: The research work from the lab was recognized by several international research awards (e.g., best paper and presentation awards at robotics conferences, first prize in the MIT Enabling Society Tech Competition, finalist of the $1M Drones for Good Competition, and the winner of the North-American SAE AutoDrive Challenge six times).
- Extensive Research Facilities: We are well equipped to support advanced robotics research (e.g., a robot hall with a motion capture system, platforms such as aerial swarms, mobile manipulators, robot arms, and ground vehicles, compute resources for simulations, data processing, and machine learning).
- Visiting Researchers and Exchange Programs: We regularly host visiting researchers and engage in exchange programs with renowned institutions to further facilitate knowledge transfer and foster international research relationships.
Data Protection Information
When you apply for a position with the Technical University of Munich (TUM), you are submitting personal information. Please take note of the Datenschutzhinweise gemäß Art. 13 Datenschutz-Grundverordnung (DSGVO) zur Erhebung und Verarbeitung von personenbezogenen Daten im Rahmen Ihrer Bewerbung (data protection information in accordance with Article 13 of the General Data Protection Regulation regarding the collection and processing of personal data in the context of your application). By submitting your application, you confirm that you have acknowledged the above data protection information of TUM.