Artificial Robot Skin

From design to application of a self-organising, whole body multi-modal artificial skin for humanoid and industry-grade robots for usage in a collaborative environment.
Humanoid Dynamic Locomotion

Contact: Dr. Julio Rogelio Guadarrama Olvera
Research into humanoid robotics, with the aim of designing a robot that can dynamically walk and interact with the environment.
Neuroengineering

Contact: Nicolas Berberich
Neuroengineering is an emerging research field which is characterized by the synergistic combination of theories and methods from neuroscience and engineering.
Purposive Learning
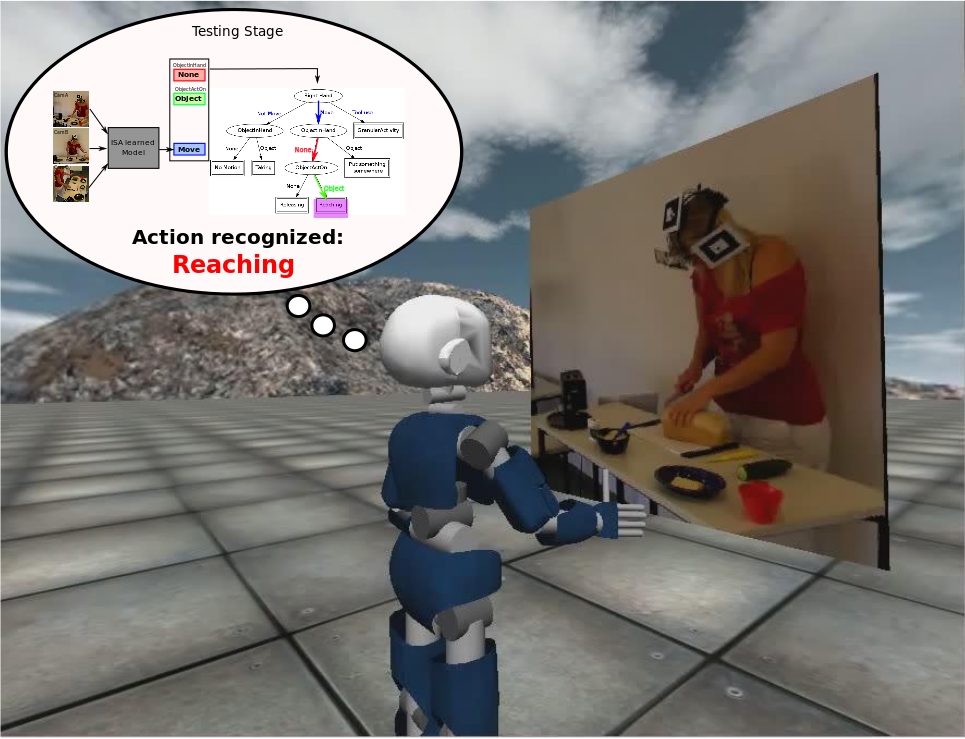
In this research, we present our approach to successfully identify and extract the meaning of human motions by automatically generating rules that define and explain human motions. Those rules will be preserved even in different scenarios.
Soft Wearable Robotics

Contact: Dr. John Nassour
Wearable robotics is a promising new area of research, which aims to provide supports that can enhance human physical performance.