About me

Alexander Tödtheide received his Dr.-Ing. in electrical engineering from the Technical University of Munich with “summa cum laude” in July 2023 and a Dipl.-Ing. in mechanical engineering from the Leibniz University of Hanover in March 2015.
During his scientific career, he worked at the Simulation, Systems Optimization and Robotics Group at Technical University of Darmstadt (Germany) with Professor Oskar von Stryk from March 2015 to August 2015, and subsequently, at the Institute of Automatic Control (IRT) at the Leibniz University of Hannover with Professor Sami Haddadin from September 2015 to March 2018. He continued his research with Professor Sami Haddadin at the Munich Institute of Robotics and Machine Intelligence (MIRMI) at the Technical University of Munich (TUM) from April 2018 to December 2022. He is currently working as the Head of Mechatronics at Danobat Switzerland AG in the field of precision robotics.
In terms of key projects, he participated in the DARPA robotics Challenge in 2015 as part of Team ViGIR with his research on robot model identification of the Boston Dynamics ATLAS robot. He also contributed to the project SoftPro Horizon 2020 by developing robot devices and controllers such as artificial compliant pneumatic robots, tactile upper-limb prostheses, and exoskeletons – works which are continued in MIRMI’s Geriatronics research and clinically related projects such as A.ID. Together with his colleague, Dr.-Ing. Johannes Kühn, he co-founded the first MIRMI cybathlon team “Cybertum” and master’s course, where he supervised a student team in a from-scratch development of an advanced upper-limb prosthesis towards the finals of the Cybathlon competition 2020 in Zurich, Switzerland.
His doctoral thesis “Unified Force-Sensitive Robot Mechatronics” deals with a development approach for tactile robotic systems, combining the modeling, design and control of the robot within one holistic framework. The framework is successfully validated by three distinct robotic devices that were designed based on various actuation, sensing, and transmission concepts, implemented, and experimentally tested. The thesis provides novel insights on the design and control of specialized tactile robotic systems and simplifies future developments. The thesis was graded with the highest mark by Professor Sami Haddadin from Technical University of Munich (TUM), Professor Tamim Asfour from the Karlsruhe Institute of Technology (KIT) and Professor Robert Riener from the Federal Institute of Technology Zurich (ETHZ).

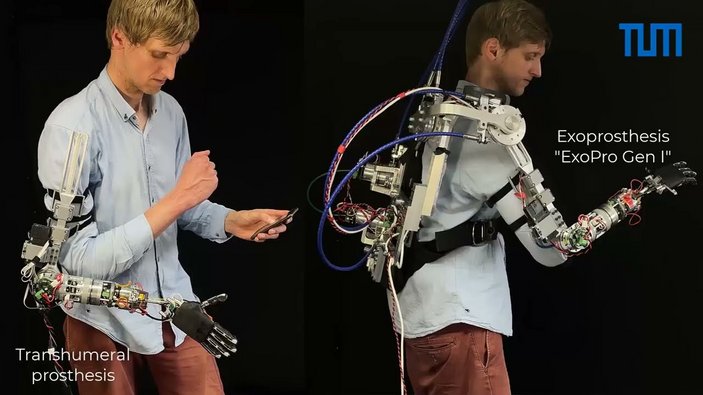
Dr.-Ing. Alexander Tödtheide published his research as the first author in seven publications in peer-reviewed and highly respected international conferences and journals such as RA-L, ICRA, Humanoids, T-RO and IJRR. Especially notable are his research on an upper-limb prosthesis, which is the first device reproducing the behavior of the human neuromuscular system in terms of body and contact awareness, compliance and degrees of freedom (IJRR 2023), and the exoprosthesis, which is the first wearable and actively-controlled prosthesis socket developed for reducing the harmful interaction wrenches in prosthesis attachments (T-RO 2023). More information about these publications can be found in MIRMI’s latest press release.
Social Media
Youtube Videos

Publications
A. Tödtheide, E. Pozo Fortunić, J. Kühn, E. Jensen, and S. Haddadin, “A Transhumeral Prosthesis with an Artificial Neuromuscular System: Sim2Real-Guided Design, Modeling and Control”, International Journal of Robotics Research (IJRR), 2023, (accepted).
A. Tödtheide, E. Pozo Fortunić, J. Kühn, E. Jensen, and S. Haddadin, “A Wearable Force-Sensitive and Body-Aware Exoprosthesis for a Transhumeral Prosthesis Socket”, IEEE Transactions on Robotics (T-RO), 2023.
A. Tödtheide and S. Haddadin, “CPA-Wrist: Compliant Pneumatic Actuation for Antagonistic Tendon Driven Wrists”, IEEE Robotics and Automation Letters (RA-L), 2018.
A. Tödtheide, T. Lilge, and S. Haddadin, “Antagonistic Impedance Control for Pneumatically Actuated Robot Joints”, IEEE Robotics and Automation Letters (RA-L), 2016.
N. Seppich, N. Tacca, K. Chao, M. Akim, D. Hidalgo-Carvajal, E. Fortunić, A. Tödtheide, J. Kühn and S. Haddadin, “CyberLimb: A Novel Robotic Prosthesis Concept with Shared and Intuitive Control”, Journal of NeuroEngineering and Rehabilitation (JNER), 2022.
J. Kühn, T. Hu, A. Tödtheide, E. Pozo Fortunić, E. Jensen, and S. Haddadin “Seamless Limb-Driven Prostheses: The Synergy-Complement Control Approach”, Nature Machine Intelligence, 2022, (under review).
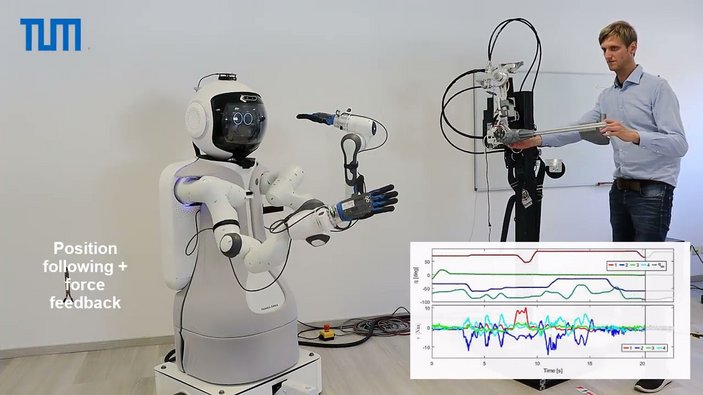
A. Tödtheide, X. Chen, H. Sadeghian, A. Naceri and S. Haddadin, “A Tactile Exoskeleton for Tele-operation: An Application in Elderly Care Robotics”, IEEE Conference on Robotics and Automation (ICRA), 2023, London, United Kingdom.
A. Tödtheide, J. Kühn, E. Pozo Fortunić and S. Haddadin, “An Integrated, Force-Sensitive, Impedance Controlled, Tendon-Driven Wrist: Design, Modeling, and Control”, IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2015, Munich, Germany.
A. Tödtheide, E. Shahriari and S. Haddadin, “Tank Based Unified Torque/Impedance Control for a Pneumatically Actuated Antagonistic Robot Joint”, IEEE Conference on Robotics and Automation (ICRA), 2017, Singapore, Singapore.
J. Vorndamme, M. Schappler, A. Tödtheide and S. Haddadin, “Soft robotics for the hydraulic atlas arms: Joint Impedance Control with Collision Detection and Disturbance Compensation”, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016, Daejeon, Korea.
M. Schappler, J. Vorndamme, A. Tödtheide, D. Conner, O. von Stryk and S. Haddadin, “Modeling, Identification and Joint Impedance Control of the Atlas Arms”, IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2015, Nancy, France.