
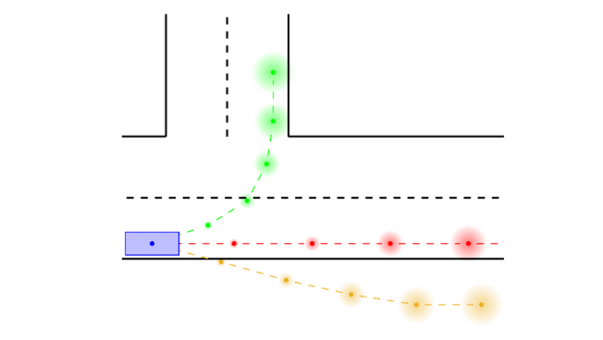
Planning and Control in Autonomous Driving

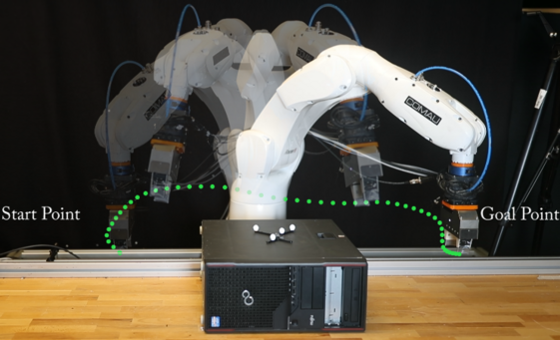
Human-Robot Joint Manipulation
Safe Learning Control
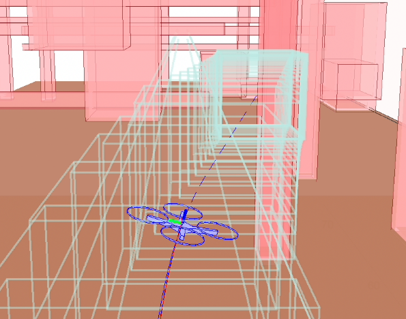
Stochastic MPC-based Motion Planning
EU Project HR Recycler
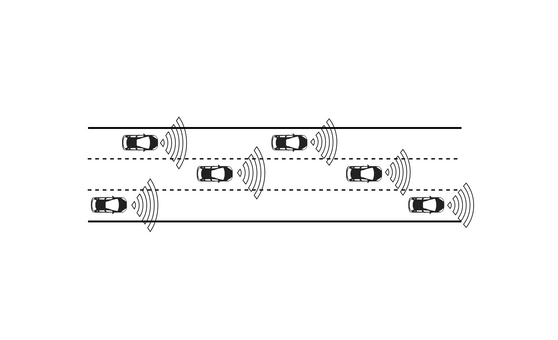
Multi-Vehicle Coupled Systems
Social Dynamics
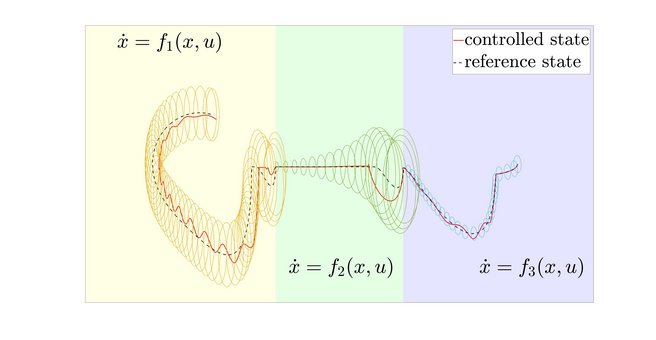
Constrained Adaptive Control
We are involved in research and teaching in the areas of automatic control theory and automation with application in robotics. Our research mainly focuses on:
- Nonlinear control
- Optimal, adaptive and robust control
- Distributed control systems
- System identification and machine learning in control
These methods are evaluated in the following application fields:
- Autonomous driving
- Human-robot interaction and collaboration
- Robot motion and manipulation in dynamic environments
- Social networks
- Automation in plant growth
In Memoriam Univ.-Prof. Dr.-Ing. Günther Schmidt
We received the sad news that Univ.-Prof. Dr.-Ing. Dr.-Ing. h.c. Günther Schmidt passed away on February 11th, 2025.
Dr. Günther Schmidt was Professor of Electrical Engineering and Information Technology and Director of the Institute of Automatic Control Engineering at Technical University of Munich, Germany, since 1972. He was also an Honorary Professor at Shanghai Tongji University, China.
He received the Dipl.-Ing. and Dr.-Ing. degree in Electrical Engineering from the Technische Hochschule Darmstadt, Germany, in 1960 and 1966, respectively. Furthermore, he was awarded the Dr.-Ing. h.c. degree by the Technische Universität Darmstadt, Germany.
In 1967 he was awarded a postdoctoral fellowship by the Max Kade Foundation, New York, USA. During that year he conducted control research in the Division of Engineering Mechanics at Stanford University, USA. He became Head of the Flight Control and Electronics Group of the Dornier Aerospace Company, Friedrichshafen, Germany in 1968. In 2003, Prof. Dr.-Ing. Martin Buss succeeded him as head of the Chair of Automatic Control Engineering. Professor Schmidt continued his research after retiring.
Over the last decades Professor Schmidt served in various industrial and academic positions. He was the author of numerous articles and books, editor of the journal at-Automatisierungstechnik and coeditor of several international journals in the field of automation and robotics as well as editor/coeditor of various books.
Professor Schmidt was a trusted expert reviewer for the EU and other national and international research foundations. He co-chaired numerous program committees for national and international conferences and workshops.
His research interests included control of continuous and discrete event systems, advanced robotics, telepresence and teleoperation, neuroprosthetics.
The LSR mourns Professor Schmidt not only as one of the most influential German control scientists, but also as a highly committed head of chair, who was in charge of the chair for more than 30 year. We will always honor his memory.