EMDRIVE
Mannheim EMDRIVE is a BMBF-funded project for the conception and realtime(RT)-compatible extension of central computing platforms and embedded compute networks for future highly automated vehicles. The project network consists of several industry partners from the automotive industry accompanied by partners from academia.
The overall goal of the partners in the course of the project is the development of a hierarchical, scalable platform concept for centralized high performance automotive RT-compute boardnets (Sensor2Edge) and the transfer of results to automotive industry.
This can be broken down into the following subgoals within the project:
- Embedded RT Compute Performance
- Power Consumption
- Dynamic, Distributed Computing
- RT-Monitoring and Diagnosis
Our Contribution: RT Monitoring and Diagnosis
Nowadys, there are over a hundred different electric control units (ECUs) that execute over 100 million lines of code inside the car. In the future, the complexity of the electronic architecture is even expected to rise, especially when it comes to software services. Since already today, the majority of availability problems of electronic control units originates from software faults, this will also be a major concern in the future. Not all of the potential faults in such a complex software structure can be found and debugged during development time.
In this context, our goal is to help defining a real-time monitoring and diagnosis infrastructure that can highly flexible, intelligently and non-intrusivley help to uncover systematic errors inside the automotive compute architecture during the lifetime of a car.
Our concept "Companion Box" incorporates a HW/SW codesign that is:
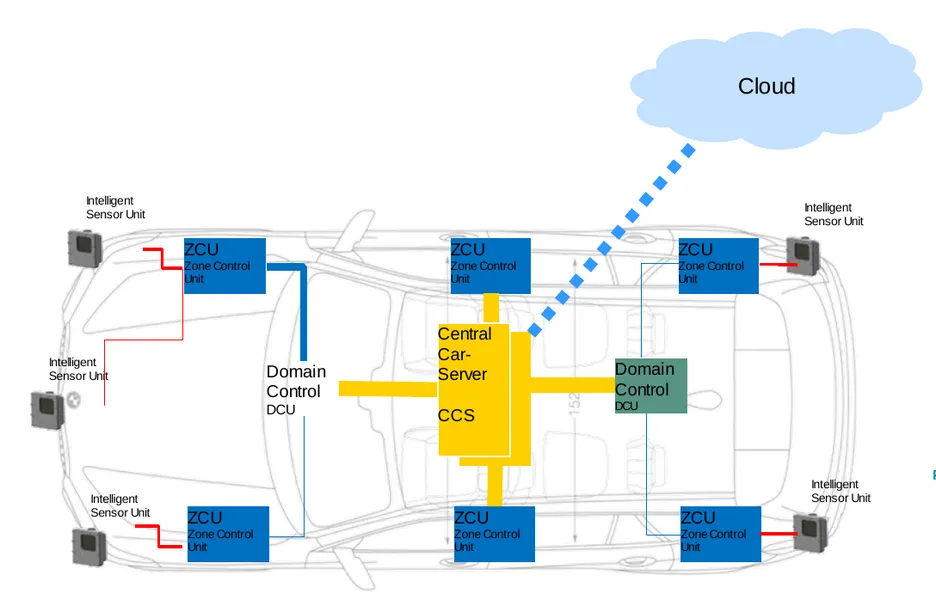
- flexibly connected to an ethernet interconnect inside the car, e.g. on a zonal gateway. By snooping on the interconnect ethernet traffic and automatically performing AI-based anomaly detection, systemic errors and in-vehicular-network fault symptoms can be detected.
- Furthermore, microcontroller tracing is used to get precise information about single component behavior inside the car.
Both of the methods are non-intrusive and do not influence the functional behavior of the electronic architecture. However, these methods cover a wide spectrum of potential observation points inside the car from component-level up to system-level in the in-vehicular network. The gathered information can be processed inside the car and subsequently be pushed to centralized control layers, e.g. in the cloud. There, the detailled description of detected faults from several cars can be orchestrated and ultimately be examined by experts for further analysis and debugging.
Current work:
- In-Vehicular-Network (Zonal Architecture, TSN, Ethernet) Simulation in OMNET++ (C++ based)
- Implementation of AI-based Ethernet anomaly detection in python: LSTM/Transformer (TensorFlow, Keras)
- AUTOSAR implementation on Infineon AURIX microcontroller
- Infineon MCDS based tracing of AURIX microcontroller and processing of traces
Open Work:
If you are interested in any of the current work items that are mentioned above and there is currently no open position, please do not hesistate to contact Matthias Ernst.
Completed Work:
- Non-intrusive Monitoring of Core Utilization on a Multicore Automotive Control Unit
(Master thesis, 2023)
- Simulation of Zonal-Architecture Intra-Vehicular-Network with TSN Functionality
(Assistant, 2022/2023)
Involved Researchers
Matthias Ernst