
M.Sc. Severin Beger
Technical University of Munich
Chair of Information-oriented Control (Prof. Hirche)
- Phone: +49 89 289 25739
- E-mail: severin.beger@tum.de
Short Biography
| Since 06/2022 | Research Assistant Chair of Information-oriented Control Department of Electrical and Computer Engineering Technical University of Munich |
| 04/2019 - 04/2022 | M.Sc. Mechatronics and Robotics M.Sc. Aerospace Department of Mechanical Engineering Technical University of Munich Thesis: Automation of the System Identification of a Solid State MEMS Mirror (at Blickfeld GmbH) RP: Observability Analysis of a Highly Nonlinear Solid State MEMS Mirror (at Blickfeld GmbH) |
| 10/2015 - 04/2019 | B.Sc. Mechanical Engineering Department of Mechanical Engineering Technical University of Munich Thesis: Flocking of Dynamic Multi-Agent Systems |
Research Interests
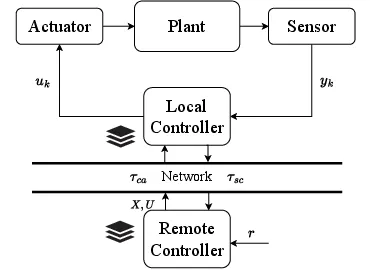
- Networked Control Systems
- Predictive control methods to account for communication constraints (delay, packet loss)
- Redundancy and safety in systems controlled over a network, e.g. Control Barrier Functions
- Online Learning for systems with a network component
- Exoskeleton Control
- Impedance and Admittance Control
- Design of Elbow Exoskeletons
- Control over a network
Student Projects and Theses
I am constantly looking for motivated students who are interested in my field of research. Topics range from Optimal Control to Learning Control, Networked Control and Robotics.
Please contact me via e-mail if you are interested in working on a thesis (e.g., bachelor or master thesis) under my supervision, even if no open topics are currently listed.
Please include your preferred starting date as well as your CV and transcript of records in your e-mail. This helps me to select a topic matching your background.
Currently available Theses
At the moment I don't have open theses available. However, you may contact mit with an unsolicited application at any time!
Ongoing Theses
- Yihui Lin: Network adaptive MPC for systems under communication constraints (Research practice)
- Nejla Selimovic: Predictive Networked Control with Redundancy (Bachelor Thesis)
Past Theses
- Vincenzo Di Cosmo: Design and Analysis of an Observer-based Impedance Controller for Human-Robot Interaction with an Exoskeleton (Master Thesis)
- Maximilian Henghuber: Improving the Admittance Control of a 1-DoF Elbow Exoskeleton through Nonlinear Friction Compensation (Bachelor Thesis)
- Aziz Jouili: Assembly and Control System Implementation of an Upper-limb Exoskeleton "EduExo Pro" (Engineering Practice)
- Ryan Winterhalter: ModExo - Embedded Design of an Elbow Exoskeleton (external final project)
- Felix Schmid-Lindenmayer: Design, Implementation and Analysis of a Networked Control Method for a 1-DoF Exoskeleton (Bachelor Thesis)
- Yuchen Cai: Development of a Model Predictive Control Method for an Uncertain In-Network Robotic Control System (Bachelor Thesis)
- Simon Schlosser: Design and Simulation of an Iterative LQG Controller for a Distributed Robotic System (Bachelor Thesis)
Thank you all for your fantastic work!