Welcome to the Chair of Information-Oriented Control!
We focus on data-driven and learning control as well as cooperative and networked control systems. We develop novel methods and tools for the formal analysis and robust control with guarantees taking into account uncertainties as well as limitations pertaining to acquisition of data, communication, and computation.
We apply our methods mainly to human-machine interaction, healthcare robotics, multi-robot systems, and general robotics. While our core competence is control engineering, we have interdisciplinary collaborations with the fields of machine learning, neuroscience (in human-robot interaction) and communications (in networked control systems).

Hybrid Neuroprosthesis for Stroke Rehabilitation
©Sabrina Bauer / TUM
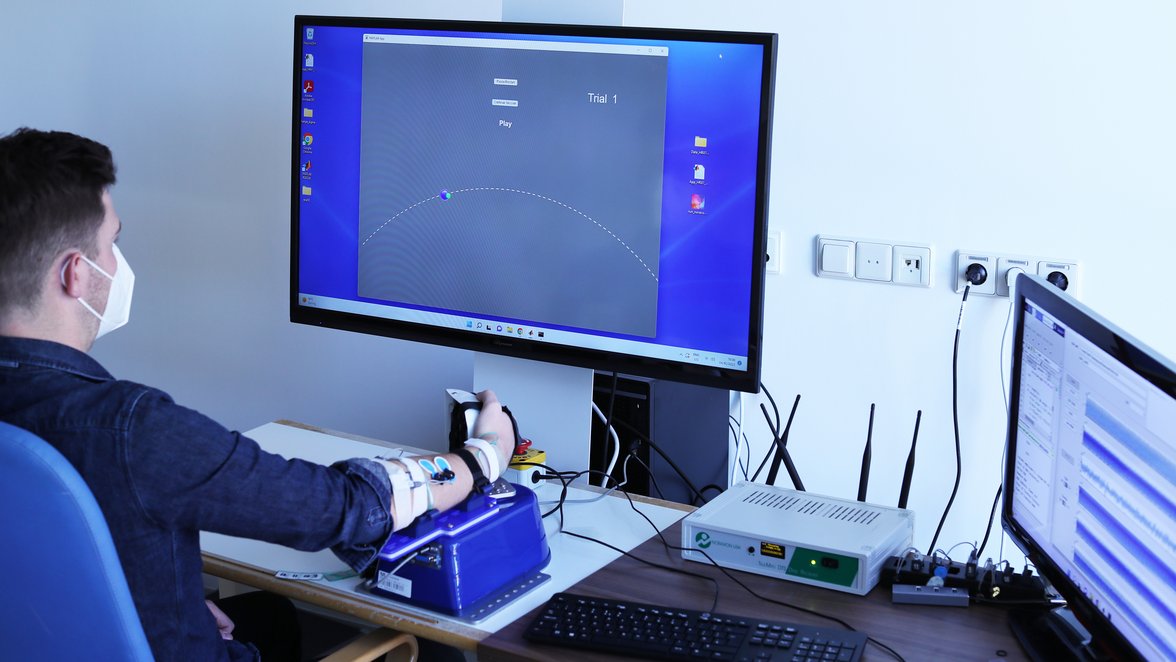
Combination of a robotic system and FES for stroke rehabilitation

Actuation of human muscles using functional electrical stimulation
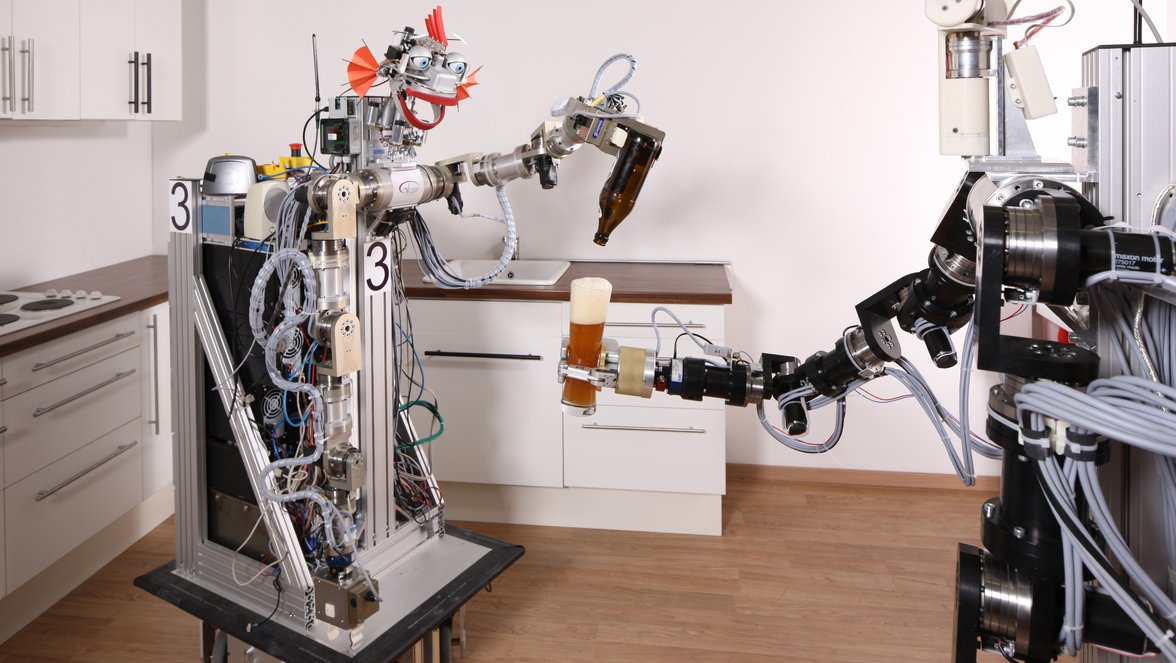
Robotic cooperative object mainpulation

Bio-inspired autonomous underwater vehicle
MuRoLa - Multi-robot laboratory
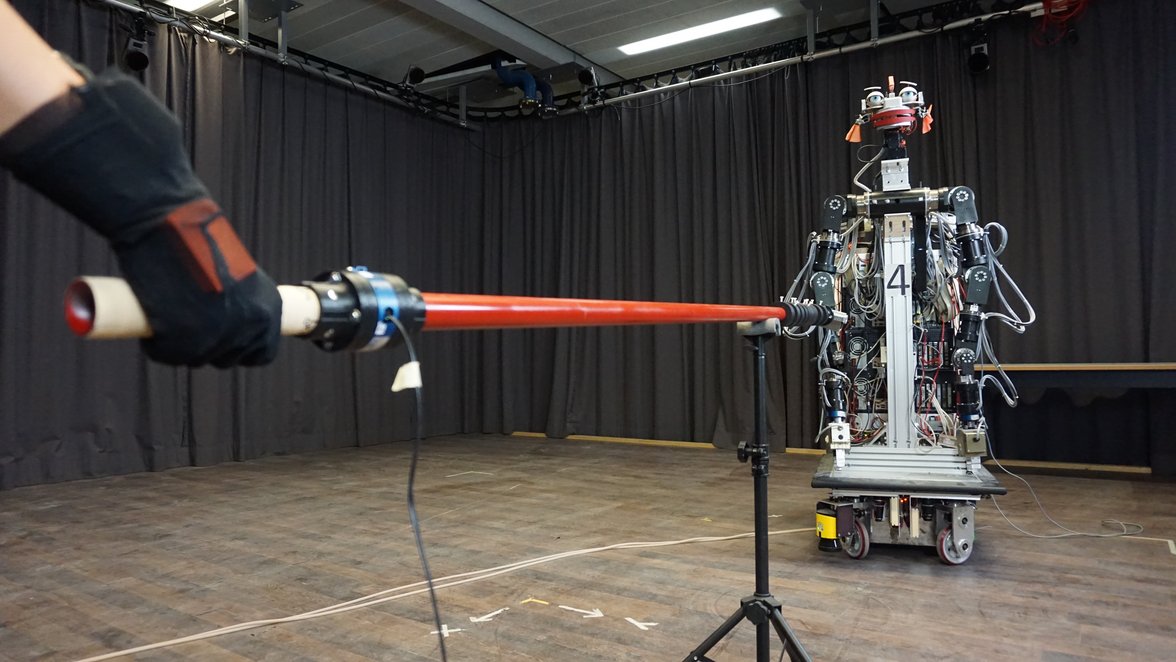
WearHap - Balancing experiment
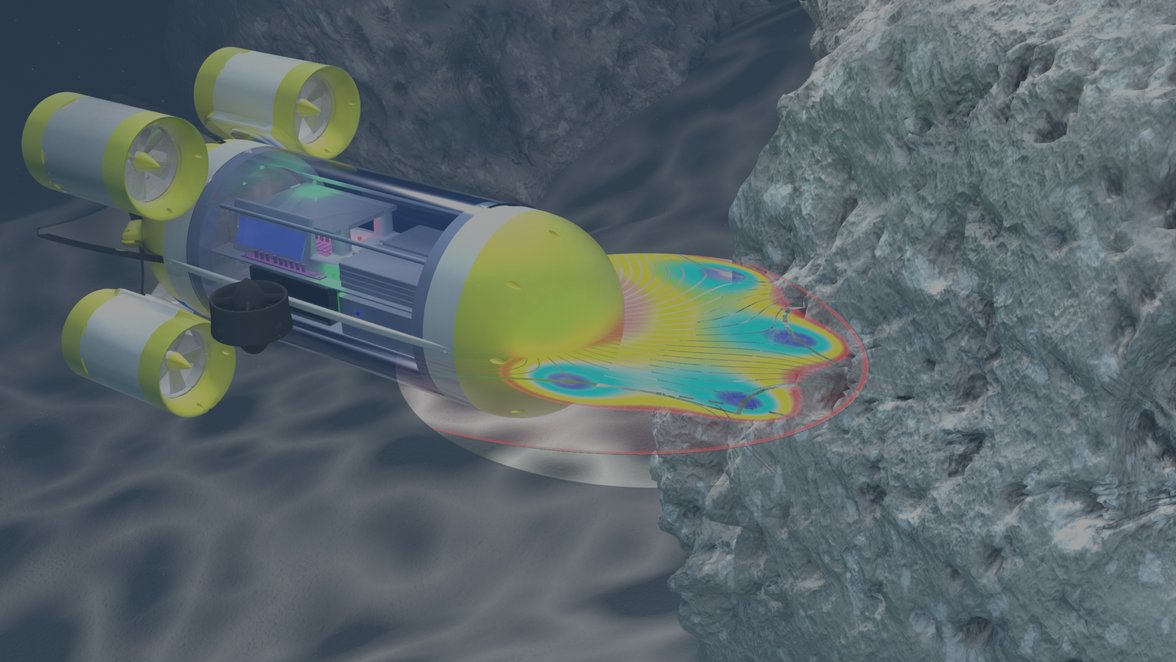
Simulated obstacle detection with an artificial lateral line system

Deformable object manipulation
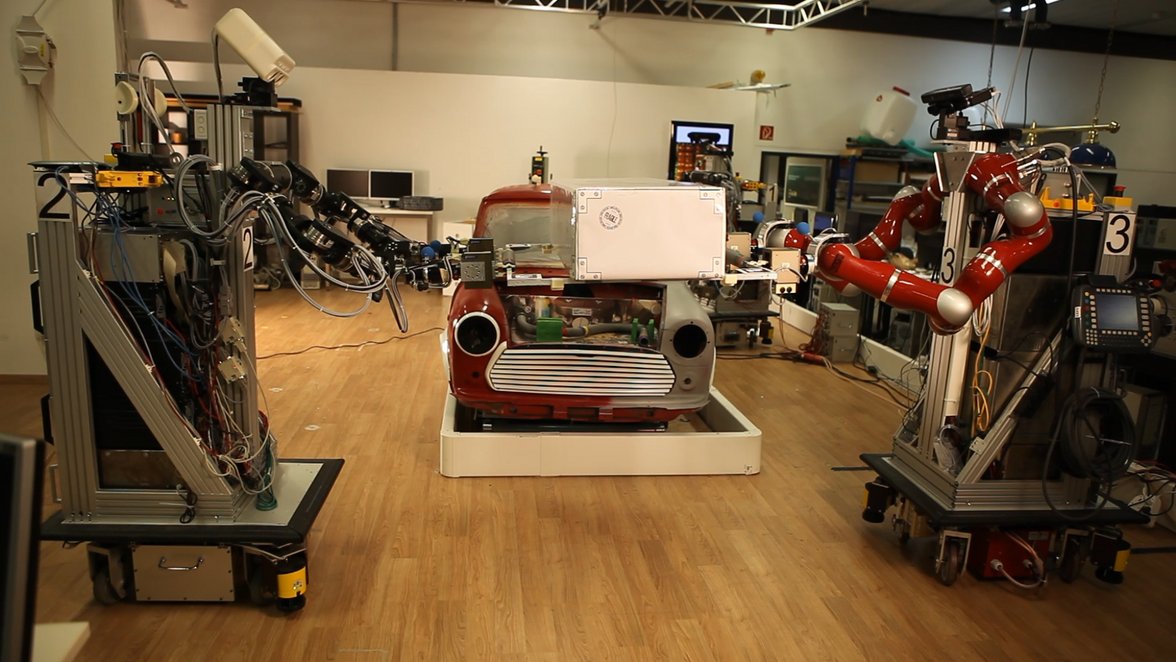
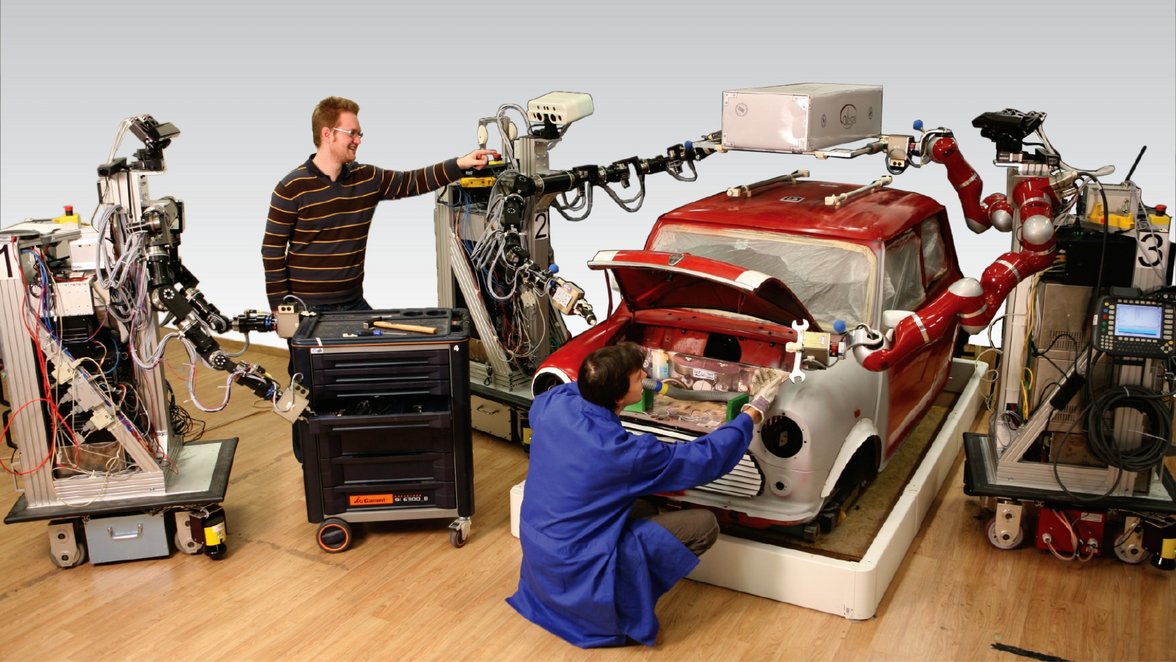
Cooperative robotics: Mounting a luggage rack

Robotic assistant: Mounting a bumper
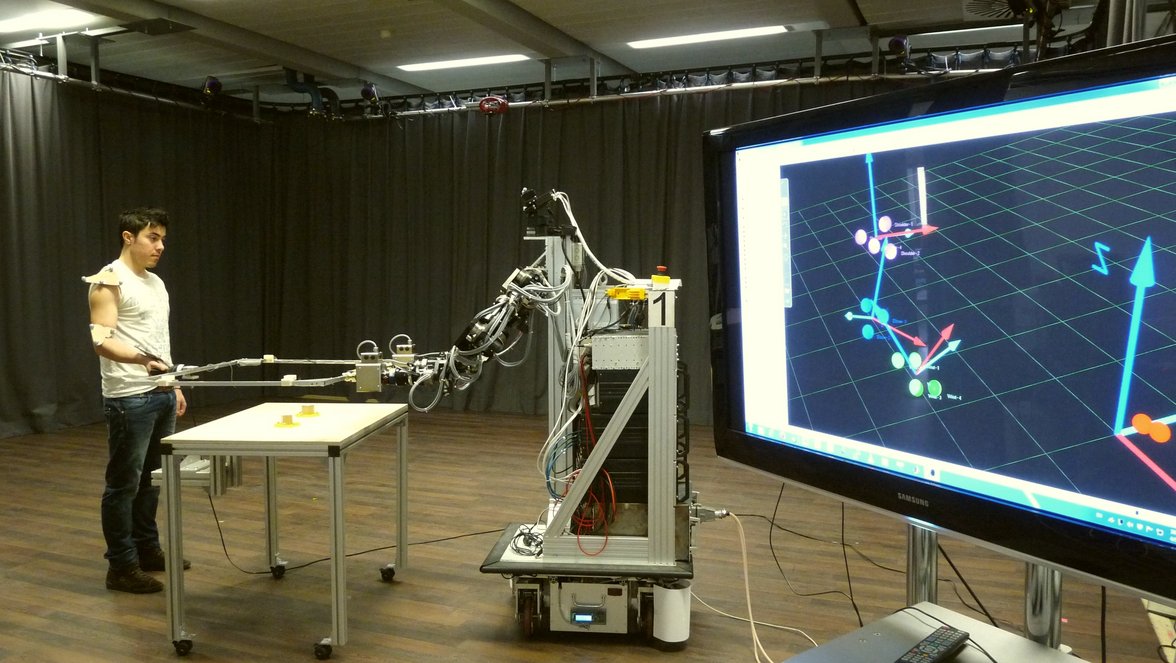
Motion capturing system for mobile manipulation

Data-Driven based Control

Impedance-based Gaussian processes for human motor behavior models

Robot team teleoperation for cooperative manipulation task through wearable haptic devices