Research Platforms

4-finger gripper

Two hands with four fingers and sixteen independent torque-controlled joints on each hand are attached to robot TOMM. They are able to hold up to 5 kg.
Adaptive Robot gripper (3 finger)

The robotic hand is compatible with many industrial robot arms. It is a programmable and mechanically intelligent hand with 3 articulated fingers and the four grasping modes can adapt to a variety of sizes and shapes.
Artificial Robotic Skin

While we constantly research on improving this skin technology, other people of our group work with already existing cell clusters to improve and enhance their projects, e.g. use the force sensors to balance out their self-designed humanoid.
Bioloid

This platform is a very popular Do-It-Yourself robotic educational kit designed for advanced projects. You can build any kinds of robot with Dynamixel, a robot servo motor from ROBOTIS Co., Ltd., (provided in Bioloid Premium kit) The Assembly manual for 29 example robots and programs are included.
Compact Omni-directional Mobile Platform

The mobile robot platform used in our TOMM features four Mecanum wheels which provide extraordinary manoeuvrability. Each Mecanum wheel has several independent rollers mounted along its circumference. The axles of the rollers are rotated at 45° against the wheel's main axle. This design enables the robot to instantly move into any direction or turn in place: the Mecanum wheels make it truly omnidirectional.
EEG Laboratory

Laboratory for electro-encephalography (EEG) recording and Brain-Computer Interface (BCI) research.
Gertie

Gertie the Robotic Desk Lamp is a novel research platform that has five degrees of freedom, and is equipped with a camera and microphone in its lamp shade. These features make Gertie a flexible and low-cost resource for conducting research into cognitive products and human-robot interaction.
Gertie will be shown in the museum Pinakothek der Moderne in the Schaudepot from February 2021 on.
Humanoid Robot H-1

ICS' the first full-size humanoid robot H-1 is a biped human-sized robot (1.65 m length and 80 kg weight). It has a total of 44 degrees of freedom. The robot was funded by DFG - Deutsche Forschungsgemeinschaft (German Research Foundation) in the program "Major Research Instrumentation".
Humanoid Robot Herbert
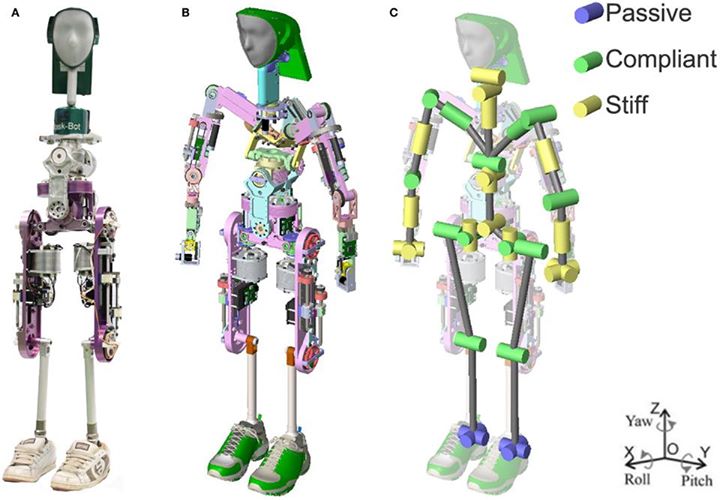
The new full-sized anthropometrically correct humanoid robot weights 35 kgs and has 33 DOFs: (1) 29 active DOFs (2 × 4 in the legs, 2 × 7 in the arms, 4 in the waist and 3 in the head) and (2) 4 passive DOFs (2 × 2 in the ankles).
Human Support Robot (HSR)

HSR - Human Support Robot is a robot by Toyota developed to offer broad-based assistance in nursing, independence and daily life
iCub

The iCub is the humanoid robot developed at IIT and was adopted by more than 20 laboratories worldwide. It has 53 motors that move the head, arms & hands, waist, and legs. It can see and hear, it has the sense of proprioception (body configuration) and movement (using accelerometers and gyroscopes). We are working to improve on this in order to give the iCub the sense of touch and to grade how much force it exerts on the environment.
Keepon

Keepon is a small robot designed to study social development by interacting with children. It was developed by Hideki Kozima (小嶋 秀樹) while at the National Institute of Information and Communications Technology (NICT) in Kyoto, Japan. Keepon has four motors, a rubber skin, two cameras in its eyes, and a microphone in its nose.
Kuka LWR-4

This robot is an active compliant manipulator intended for collaborative contact tasks. It does have some level of saftety certification and was one of the first robot arms we tested our artificial skin with.
Robot TOMM

TOMM is a robot that was built at the ICS. It consists of two UR-5 arms and a base (compact omni-directional mobile platform). The arms of TOMM are equipped with the artificial robotic skin cells.
NAO

NAO is a programmable, 58cm tall humanoid robot. It has 25 degrees of freedom (DoF) and features two cameras, four directional microphones, a sonar rangefinder, two IR emitters and receivers, one inertial board, nine tactile sensors and eight pressure sensors in its feet. Various communication devices, including voice synthesizer, LED lights, and 2 high-fidelity speakers are part of its design as well as Intel ATOM 1,6ghz CPU (located in the head) that runs a Linux kernel and supports Aldebaran’s proprietary middleware (NAOqi).
Pepper

Pepper is a wheeled robot with a human shape. It is about 120cm tall and can interact with people. Pepper has a touchpad to be used for interaction or sharing information.
PR2

The PR2 has two 7-DOF arms with a payload of 1.8 kilograms. Sensors include a 5-megapixel camera, a tilting laser range finder, and an inertial measurement unit. The "texture projector" projects a pattern on the environment to create 3D information for capture by the cameras. The head-mounted laser scanner measures distance by time-of-flight. The two computers located in the base of the robot are 8-core servers, each of which has 24 Gigabytes of RAM; it runs the popular Robot-OS.
Universal Robots UR-5 and UR-10

Universal Robots' collaborative robotic arms are easily integrated into existing production environments. With 6 articulation points and a wide scope of flexibility, they are designed to mimic the range of motion of a human arm. ICS has two middle sized UR-5 and one larger UR-10.