Artificial robot skin
Description
Skin is a very important sensor for human beings. Up to 5 million discrete receptors of different modalities (e.g. temperature, force and vibration) are distributed close to our body's surface. Skin helps us to learn more about our environment and how we can safely interact with it. We can for example use heat transfer to discriminate different materials while touch exited vibrations (up to 700 Hz) convey information on surface structures.
A humanoid robot purely relying on joint information (position and/or force) would neglect much of the benefits provided by an artificial sensor skin.
Our goal is to achieve multimodal sensitivity on all parts of a humanoid robot. We believe that this is an important step to close the sensational gap between human and humanoids.
Related Work
Most of the existing humanoid robots are not equipped with an artificial sensor skin. Projects dealing with the topic focus either on a single modality or only a small area on the robot, like the fingertips.
Concept
We regard an artificial skin as a system of hardware and software. With a technical system robustness and speed are very important. Multiple modalities are necessary to be able to discriminate between different types of touch. With a whole body system it is advantageous to reduce the wiring and provide automated calibration routines as far as possible. Our approach separates the actual sensitive skin into small module entities. This makes it easy to integrate our skin into new robots and is another step towards the long demanded intelligent system on a chip (SoC).
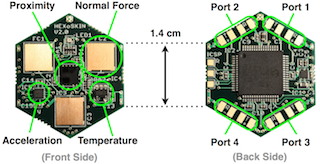
Prototype
The following pictures show our current prototypes based on industrial components. Detailed technical information is contained in our papers e.g. (IEEE TRO RST 2011).