French-German Conference on Humanoid and Legged Robots 2018



The construction of humanoid and bipedal robots based on humans and legged animals is a complex, interdisciplinary and rapidly evolving research field. There are numerous scientific challenges in designing a robot that can walk, run, jump, and move in a robust manner, similar to any human being. Technical applications of such robots are expected in the near future in fields ranging from service robotics to medical robotics. This year conference will have a special focus on developments in Korea with guests speakers from there.
This conference aims to bring together leading researchers from France and Germany to hold technical talks and discussions on the topics related to Humanoid and Legged Robots. HLR 2018 is the follow-up of five successful German-French HLR Conferences in Toulouse 2016, Heidelberg 2014, Paris 2011, Karlsruhe 2006, and Metz 2004.
Date: 5-7 December 2018, in Munich/Germany
Local Organisers:
Prof. Gordon Cheng, Chair for Cognitive Systems/TUM
Prof. Dongheui Lee, Human-centered Assistive Robotics/TUM
Dr. Christian Ott, Institute of Robotics and Mechatronics/German Aerospace Center, DLR
Prof. Daniel Rixen, Institute of Applied Mechanics/TUM
French organisers:
Prof. Pierre-Brice Wieber, INRIA Grenoble
Prof. Jean-Paul Laumond, LAAS-CNRS
Dr. Nicolas Mansard, LAAS-CNRS
| Wednesday, 5.12.2018 | Speaker | Title& Abstract |
|---|---|---|
| 10:00 | Welcome by Prof. Friedrich Pfeiffer, TUM Department of Mechanical Engineering, Former professor of mechanics | |
| 10:15-10:45 | Andre Seyfarth, TU Darmstadt | Modular Composition of Human Gaits Through Locomotor Abstract: Human locomotion is a complex movement task, which can be divided into a set of locomotor sub-functions. These sub-function comprise stance leg function, swing leg function and balance. Each of these locomotor subfunctions requires a specific control of individual muscles in the human body. We propose a novel method based on sensor-motor-maps to identify the appropriate motor control settings based on sensory feedback loops. Based on template models, both the biomechanical as well as the neuromuscular dynamics of gait can be studies and described at different levels of detail.Sub-functions and Sensor-Motor-Maps |
| 10:45-11:15 | Antonio El Khoury, Wandercraft | First self-balanced dynamic walk for paraplegic patients: the case of Wandercraft's exoskeleton Abstract: Wandercraft has developed Atalante, the first autonomous exoskeleton with dynamic walking capabilities. Atalante allows spinal cord injury (SCI) patients to stand up and walk without the use of crutches, getting them closer to leading an ordinary life. As Wandercraft gets ready to market Atalante to rehabilitation centers in Europe, we will showcase its capabilities and how they can help physicians, physiotherapists, and foremost patients. We will also discuss the strong link between the latest advances in the humanoid robotics field, and our current and future work. |
| 11:15-11:30 | Coffee and posters | |
| 11:30-12:00 | Daniel Renjewski, TUM | Challenges in Dynamic Walking Abstract: Bipedal robots are built for several reasons - as a platform for solving hard control problems, for industrial, entertainment and service applications and for studying legged locomotion. For today's robots versatility and efficiency seem to be incompatible objectives. This talk explores the gap between humanoid and human locomotion and what technical challenges still have to be addressed. |
| 12:00-12:30 | Christine Chevallereau, LS2N | An essential model for generating walking motions for humanoid robots Abstract: The modeling of humanoid robots with many degrees-of-freedom (DoF) can be done via the complete dynamic model. However, the complexity of the model can hide the essential factor of the walking, i.e. the equilibrium of the robot. One alternative is to simplify the model by neglecting some dynamical effects like in the 3D Linear Inverted Pendulum (LIP) model. Nonetheless, when gait is used on the complete model, the assumption that the ZMP will be the expected one. The objective of this paper is to propose a new model for walking that has the same dimensions as the 3D LIP model but considers the complete dynamics of the humanoid. The proposed model is called essential model and it can be written based on the internal states of the robot and/or external information, thereby generating models for different purposes. The main advantage of the essential model is that it allows to generate walking gaits that ensure that the Zero Moment Point (ZMP) is kept in a desired position or it follows a desired path while the gait is performed. Furthermore, impacts of the swing foot with the ground can be considered to compute periodic walking gaits. In order to show the advantages of the proposed model, numerical studies are performed to design periodic walking gaits for the humanoid robot ROMEO. |
| 12:30-13:00 | Baek-Kyu Cho, Kookmin University/Seoul | Forward Standing Jump of Biped Robots Abstract: This study introduce motion generation for stable forward standing jump of a biped robot. For motion generation, a height varying inverted pendulum model is introduced and z-directional motion, x-directional motion, and y-axis angular momentum is sequentially considered. The z-directional jumping motion is generated with respect to the given target flying time. It is determined by minimizing maximum speed and maximum torque of the all actuators. Then, the x-directional motion is generated using model predictive control (MPC) so that ZMP is placed in the stance foot. Since the height of COM is varying, the height variation is considered in MPC scheme. At last, the y-axis angular momentum is set to constant so that it doesn’t affect ZMP. The proposed algorithm is verified in simulations and experiments. |
| 13:00-14:15 | Lunch with posters | |
| 14:15-14:45 | Katja Mombaur, Universität Heidelberg | Performance evaluation and improvement of walking and balancing motions in humans and robots |
| 14:45-15:15 | Marco Hutter, ETH Zürich | Model-based and model-free locomotion control for quadrupedal systems Abstract: In this talk, I will give insight into recent activities with the quadrupedal robot ANYmal. I will present our recent findings on model-based locomotion control and a new learning-based method that significantly increases agility of legged robots. Moreover, I will showcase results from the first application as autonomous robot on an off-shore platform, in sewer, and for search and rescue. |
| 15:15-15:45 | Coffee and Posters | |
| 16:00-17:30h | Labtour in Garching |
- Felix Aller: "Development of a Unified Benchmarking Scheme for Bipedal Locomotion"
- Julio Rogelio Guadarrama Olvera, Technical University of Munich, ICS: "Enhancing Biped Locomotion on Unknown Terrain Using Tactile Feedback"
- Martin Huber: “Stabilization of Reinforced Navigation with Nonlinear Model Predictive Control"
- Majid Khadiv, Max Planck Institute for Intelligent Systems: “Walking control based on step timing adjustment”
- Quentin Leboutet, Technical University of Munich, ICS: "Tactile-based Whole-body Compliance with Force Propagation for Mobile Manipulators"
- Atabak Nezhadfard, Technical University of Kaiserslautern: "Bioinspired Biarticular actuation in Compliant Robotic Leg CAR"
- Karna Potwar, Technical University of Munich, Human-centered Assistive Robotics: "Simulating bipedal walking using a dynamic center of pressure based model"
- Philipp Seiwald, Technical University of Munich, AM: "Motion Planning for Humanoids - Dynamic Multi-Contact Locomotion in Unknown Environments"
- Felix Sygulla, Technical University of Munich, AM:"Biped Robot Walking Stabilization"
- Petr Zaytsev, Universität Stuttgart: "All common bipedal gaits emerge from a single passive model"
| Thursday, 6.12.2018 | Speaker | Title & Abstract |
|---|---|---|
| 9:00 | Welcome by Prof. Gerd Hirzinger | |
| 9:10-9:40 | Andrew Comport, CNRS | Visual SLAM for the closed loop control of humanoid robots Abstract: In this talk I would like to present our collaboration and work in the context of the European H2020 project, Comanoid, on using an advanced real-time visual SLAM algorithm for the closed loop multi-contact planning and control of a humanoid robot. I will describe our dense visual SLAM approach and show how, along with joint encoders, it can effectively be used to deal with the problem of localising a robot with respect to an unknown map of the environment using cameras. It will be shown how errors in robot posture, perturbations arising from improper contact-modelling or external perturbations can be corrected using closed loop control. I will present some of the technical and scientific difficulties that we encountered along with achievements and perspectives. Several experiments on the HRP series of robots will be presented and discussed to illustrate the proposed methods. |
| 9:40-10:10 | Johannes Englsberger, DLR | DCM-based gait generation for walking on moving support surfaces + (independent) some insights/hacks for successful torque-based walking Abstract: In this talk, I will first present the latest enhancements of our DCM (Divergent Component of Motion) based walking gait generation method -in particular its extension to walking on moving ground surfaces, such as conveyor belts and escalators. The method is purely analytical and allows for compact computation of a whole multi-step preview of DCM and CoM trajectories in closed form. I will then (independent topic) summarize some insights we gained during our experiments on torque-based walking and present some hacks on how to suppress medium-frequency oscillations of the robot and on the robustification of foot touch-down and state-estimation. |
| 10:10-10:40 | Coffee break | |
| 10:40-11:10 | Olivier Stasse, CNRS | Robots for the Future of Aircraft Manufacturing - Open source and flexibility Abstract: Since 2012, Airbus Manufacturing and the Gepetto team have been working on several Proof-Of-Concepts oriented towards some challenges faced in the production line. We will highlight the technological bricks developed in the frame of the research performed in the Gepetto Team which have been seen as relevant by our industrial partner. We will also describe the various constraints which led us to the specification of TALOS, now sold as a commercial product. The scientific goals to be pursued on this research platform will be also detailed in the frame of a newly started joint laboratory called ROB4FAM. |
| 11:10-11:40 | Andrea del Prete, Max Planck Institute for Intelligent Systems | Multi-contact balancing: elastic contacts & capturability Abstract: This talk will discuss two crucial issues related to balancing in multi-contact scenarios. The first problem is contact elasticity. Usually, contacts are assumed to be perfectly rigid. This assumption is a good approximation of reality as long as contacts are stiff and well damped. However, when this is not the case, performance may suffer. I will discuss different state-of-the-art methods to deal with elastic contacts, and present novel approaches that improve performance, especially for the case of under-damped contacts. The second problem is how to anticipate a fall, which is fundamental for any robot that has to balance. Currently, fast fall-prediction algorithms only exist for simple models, such as the Linear Inverted Pendulum Model (LIPM), whose validity breaks down in multi-contact scenarios (i.e. when contacts are not limited to a flat ground). I will present a fast fall-prediction algorithm based on the point-mass model, which remains valid in multi-contact scenarios. We validated the approach through extensive simulations with the humanoid robot HRP-2 in randomly-sampled scenarios. Comparisons with standard LIPM-based methods demonstrate the superiority of our algorithm in predicting the fall of the robot. |
| 11:40-12:10 | Jaeheung Park, Seoul National University | Compliant Motion Control Strategies for Humanoid Robots Abstract: In this talk, I would like to start by briefly sharing our experience on DRC Finals 2015 to motivate the importance of compliance in multi-contact situations. Then, our control approach is introduced to exploit and also compensate for the actuator compliance on our position-controlled robot, DYROS-JET. This shows the possibility of using compliant actuators for humanoid robots. Secondly, the development of the whole-body control framework will be presented through the experimental results on our torque-controlled robot, DYROS-RED. |
| 12:10-13:45 | Lunch | |
| 13:40-13:45 | Welcome by Prof. Heckl, Director Deutsches Museum | |
| 13:45-14:15 | Abderrahmane Kheddar, CNRS-AIST/LIRMM | Humanoids in large-scale manufacturing: the Airbus use-case study and perspectives Abstract: Humanoid robots (humanoids) are gaining more maturity in terms of hardware and embedded software. Each year we witness substantial improvement of an existing series and the revelation of new platforms. So far, humanoids' developments have been confined to research, and there is still much to do in several specific aspects in order to engage into an innovation pathway toward full industrial products. The first revealed applications and business cases of humanoid robots are oriented toward entertainments, domestic assistance for frail persons and recently, the DARPA robotic challenge opened potential applications in rescue and disaster operations. During the four previous years, we focused our efforts on applications of humanoids in manufacturing. There has been clear expression of the requirements by Airbus Group for having humanoids operate in aerospace large-scale manufacturing and assembly lines, my talk will sum-up the achievements toward that purpose. |
| 14:15-14:45 | Maren Bennewitz/ Stefan Osswald, University of Bonn | Efficient Coverage of 3D Environments Containing Articulated Objects with Humanoids Abstract: Covering a known 3D environment with a robot’s camera is a commonly required task, for example in inspection and surveillance, mapping, or object search applications. In addition to the problem of finding a complete and efficient set of view points for covering the whole environment, humanoid robots also need to observe balance, energy, and kinematic constraints for reaching the desired view poses. We approach this high-dimensional planning problem by introducing a new inverse reachability map representation that can be used for fast pose generation and combine it with a next-best-view algorithm. Furthermore, we extend the coverage problem by also considering articulated environments where the robot has to manipulate objects to inspect obstructed areas. This is particularly challenging due to the many additional degrees of freedom resulting from the articulation that need to be considered when planning a coverage strategy. To cope with this challenge, we exploit graphics processing units present in many embedded devices to parallelize the computations of a greedy next-best-view approach, i.e., algorithms for costmap computation, path planning, as well as evaluation of viewpoint candidates. |
| 14:45-15:15 | Coffee break | |
| 15:15-15:45 | Samer Alfayad, Versailles ST-Quentin-En-Yvelines University | From Humanoids to Assistive Devices: Mechatronics Design, Electric & Hydraulic Actuations Abstract:Improving our vision of mechatronics design, will allow the development of robotic assistive devices best suited to meet the user needs. To raise this challenge, the research carried out focused on two fields: 1) The development of HYDROïD, a hydraulically actuated humanoid robot. The goal was to propose an innovative solution in order to eliminate all external pipes and replace them with integrated hydraulic passages. This leads to an original solution where “arteries” and “veins” were built inside the HYDROïD body to drive hydraulic fluid like blood in human body. A new “integrated hydraulic actuation” method was proposed and implemented on HYDROïD robot. Two integrated electrohydraulic actuators were also proposed. 2) The development of an exoskeleton (SOL0.1) for the personalized rehabilitation of the lower limb of an adolescent suffering from spinal cord injuries. This electrically actuated exoskeleton is easily re-sizable, adjustable and adaptable to the growth of its user. The final section of this presentation is dedicated to the research project which focuses on the disabled youth daily welfare problems. Tacking benefits on former experiences in developing mechatronics systems mainly with hydraulic actuation, new assistive devices that can “grow up with the teenager” will be developed. Two main devices will be targeted: i) Lightweight and Scalable Exoskeleton for Teenagers with dysfunctional limbs; ii) Affordable, Scalable and Active Prosthesis for amputee teenagers. |
| 16:15-17:30 | Lab tour downtown Munich |
| Friday, 7.12.2018 | Speaker | Title& Abstract |
|---|---|---|
| 9:00-09:10 | Welcome by Dr. Paul Alibert, French Embassy, Hochschulattaché in Bayern für Zusammenarbeit in der Wissenschaft and Welcome by Dr. Hannemor Keidel, TUM Delegate officer for the scientific exchange with France | |
| 09:10-09:40 | Justin Carpentier, INRIA | Towards Online Optimal Control of Legged Robots Abstract:Locomotion of legged robots is a complex process involving highly-dynamic and non-holonomic physical quantities. In particular, the correct synchronization of these quantities is required to produce a balanced and efficient motion on the real hardware. Over the past few years, optimal control appears as the magic toolbox to compute feasible actions that fulfil all these requirements. In this talk, I will introduce and discuss some recent contributions made in this field with the aim of driving the locomotion of legged systems towards highly-dynamic movements. I will further investigate the reasons for this success and introduce some of my recent contributions in this field. I will conclude with some personal research perspectives. |
| 09:40-10:10 | Atabak Nejadfard, TU Kaiserslautern | Design of a biarticular actuation and its implications to bipedal locomotion Abstract: Muscular structure of the human body has a fundamental influence on the efficiency of locomotion. We present a compliant robotic leg (CARL) inspired by the characteristics of the human musculoskeletal system. As part of CARL, we introduce an efficient actuation system RRLAB-SEA that is developed to emulate biological muscles. Our leg is designed to replicate the structural characteristics of the human musculoskeletal system. Biarticular actuators are used to adopt the muscle redundancy of a human body. This architecture enables a better distribution of actuation mass over the leg, with heavier actuators located closer to the trunk. We introduce the design challenges of such an actuation system adopting to the moment arm profiles of a human leg. The redundancy of biarticular actuators can be used to reduce the consumption of negative mechanical energy and henceforth help increasing the overall efficiency of movements. |
| 10:10-10:40 | Coffee break | |
| 10:40-11:10 | Jean-Baptiste Mouret, INRIA | Whole body control with imperfect models and learning Abstract: The current whole-body control approaches are successful at controlling modern humanoids, but they still require a tedious trial-and-error process to tune both the tasks and the model. In addition, they assume that the model does not change over time (e.g., damage, unexpected event). In our work, we aim at relaxing the need for a near-perfect model by leveraging reinforcement learning algorithms and/or gradient-free optimizers. In this talk, we will introduce our whole-body controller for iCub and show our progresses regarding tele-operation, online adaptation to imperfect models, and offline tuning for robustness to differences in the models. |
| 11:10-11:40 | Sven Behnke, University of Bonn | Flexible Driving-stepping Locomotion and Human-like Manipulation for Disaster Response” Abstract: Events like the Fukushima earth quake and tsunami demonstrate that today’s disaster-response robots lack capabilities in mobility and manipulation which would be needed for effective intervention, e.g. in a damaged nuclear power plant. To advance the state of the art in disaster-response robotics, DARPA held in 2015 its Robotics Challenge, where robots had to solve a variety of tasks relevant for affected man-made environments. For this challenge, our team developed the mobile manipulation robot Momaro. Using a hybrid wheeled-legged base, it is capable of omnidirectional driving, can adapt to the terrain, and overcomes obstacles by making steps. The robot is equipped with an anthropomorphic upper body for human-like manipulation. In the H2020 project CENTAURO, the Centauro robot was developed, which follows the same concept. Using an immersive teleoperation interface, Momaro demonstrated several disaster-response tasks at the DARPA Robotics Challenge, where our team NimbRo came in as best European team. We also developed autonomous navigation and manipulation behaviors for Momaro, which were demonstrated at the DLR SpaceBot Camp 2015. The Centauro robot demonstrated several complex locomotion and manipulation tasks in two evaluation campaigns which took place at the premises of the CENTAURO application partner Kerntechnische Hilfsdienst GmbH. |
| 11:40-12:10 | Mirko Wächter, Karlsruhe Institute for Technology | ARMAR-6: A Collaborative Humanoid Robot for Maintenance Tasks in Industrial Environments Abstract: We present the collaborative humanoid robot ARMAR-6, which has been developed to perform a wide variety of complex maintenance tasks in industrial environments, collaborating with human workers. We present the hardware, software, and functional architecture of the robot as well as its current abilities. Those include the recognition of the need of help of a human worker, the execution of maintenance plans, compliant bimanual manipulation, vision-based grasping, fluent object handover, human activity recognition, natural dialog, navigation and more. |
| 12:10-12:40 | Pierre-Brice Wieber, INRIA | Can we expect cheaper legged robots? Abstract: Biped and quadruped robots are beginning now to master the skill of walking dynamically in most standard situations, but this currently requires very precise and expensive sensors, very precise and expensive actuators, and very fast and expensive electronics and computers, resulting in terribly expensive robots. This is because the dynamics of the Center of Mass (CoM) of these robots over the feet resting on the ground is unstable, and therefore very sensitive to all sources of uncertainties. However, how fast and precise, and therefore how expensive should the sensors, actuators and electronics be has never been investigated in the existing scientific literature. A precise quantification of the effect of uncertainties and sampling period on legged balance control seems to be missing, and it is the goal of this talk to initiate this discussion. |
| 12:40-14:00 | Lunch | |
| 14:45- 16:00 | Labtour at DLR | workshop finishes at DLR around 16:00, transportation back to Munich by bus |
Directions on how to get to the different venues are listed below:
- 1st day, December 5th, 2018
in Garching: IAS building
Lichtenbergstraße 2 a 85748 Garching
Public transportation: U6 Garching Forschungszentrum (takes approx. 30min from downtown Munich)
- 2nd day, December 6th, 2018
Deutsches Museum, Ehrensaal
Museumsinsel 1
80538 München
https://www.deutsches-museum.de/en/information/directions/
Publication transportation:
all S-Bahn trains to station "Isartor", then walk from there or Tram Nr. 17 stop "Deutsches Museum"
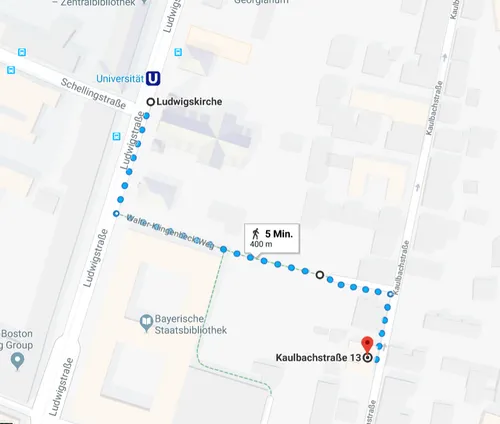
- 3rd day, December 7th, 2018
Kaulbachstr. 13
80539 München
Public transportation:
Underground line U3/U6 stop Universtity (Universität)
Social program
Wednesday, December 5th, 19:00h
Conference Dinner:
Hofbräuhaus, Room: Münchner Zimmer
https://www.hofbraeuhaus.de/en/how-to-find-us.html
Closest S-Bahn/U-Bahn stopp: Marienplatz
Thursday, December 6th, 2018:
tba
Accomodation
Hotel recommendations:
- Ibis Hotel, Dachauerstr. 21, 80333 München Room rate approx.: € 90,00
- Augusten Hotel, Augustenstr. 2, 80333 München Room rate approx.: € 90,00
- Flemming´s Hotel, Bayerstr. 47, 80335 München Room rate approx.: € 175,00
- Marriot Courtyard Munich City Center, Schwanthalerstr. 37, 80336 München Room rate approx. € 220,00
Support
We would like to thank the following organisations for their support:
