Curriculum Vitae
Qian Feng is an external PhD student working at Agile Robots AG under supervison of Prof. Dr.-Ing. habil. Alois Christian Knoll, started from 2021. He graduated with the Master of Science degree in Mechatronik and Info. Tech. from the Technische Universität München, Germany. He received the Bachelor of Engineering degree in Mechatronics from Zhejiang University, Hangzhou, China.
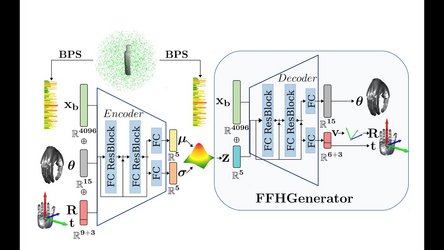
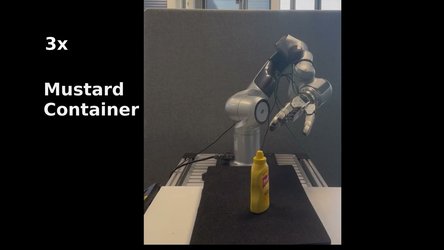
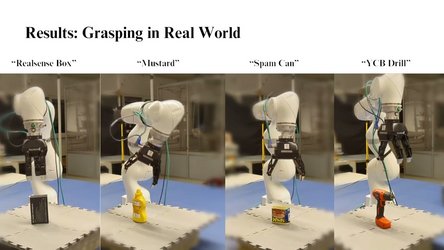
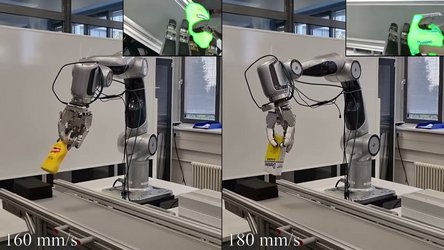
His research focuses on dexterous grasping and manipulation, imitation learning, sim2real, tactile sensing.
Offered Thesis
Open theses:
I provide open theses with topics of:
Supervised Research Practice (Forschungspraktikum)
- [WS20]: Gengyuan Zhang- "Automatic Camera Calibration for Robotic Grasping"
- [SS21]: Yansong Wu- "Learning based Robotic Assembly using Force/Tactile Feedback"
- [SS22]: Yuhan Liu- "Force-Controlled Robot Assembly Skill Development"
- [WS23]: David S. Martinez- "Enhancing Deep Generative Robotic Grasping: Integrating the Robotiq-3F Gripper with CVAE and CGAN Models"
Supervised theses:
- [MT | WS20]: Hongxu Liu- "3D Object Shape Prediction from a Single Viewpoint"
- [MT | WS20]: Vincent Mayer - "Sim2Real Grasping with the DLR-HIT Hand II"
- [MT | SS20]: Yikai Xu - "Heuristic Search Path Planning with Reachability Map"
- [MT | SS21]: Chengjie Yuan- "A Sim-to-Real Learning-Based Approach to Robot Assembly Tasks"
- [MT | WS22]: Yannick Burkhardt- "Visual 3D Control for Dynamic Robotic Grasp Execution"
- [MT | WS23]: Deniz Bekleyis Seven- "Reinforcement Learning Based Object Manipulation with Multi-Fingered Robotic Hand"
- [MT | SS24]: Hang Li- "Language guided robot manipulation skills learning via diffusion model"
- [MT | WS24]: David S. Martinez- “ Neural Feature Fields for Language-based Dexterous Robotic Manipulation”
Ongoing theses:
- [MT | WS24]: Leyong Loh- "Multimodal Latent Diffusion Model for Task-Oriented Grasping“
- [MT | SS25]: Zeyu Xu- “Scalable Human-like Robotic Dexterous Grasp Synthesis”
- [MT | SS25]: Jiaqi Mo- "GraspFusion: Fusing RL-Synthesized Grasps into Diffusion Policy for Dexterous Manipulation