- Preserving and combining knowledge in robotic lifelong reinforcement learning. Nature Machine Intelligence, 2025 more…
- Preserving and combining knowledge in robotic lifelong reinforcement learning. Nature Machine Intelligence 7 (2), 2025, 256-269 more…
- Just-in-Time Informed Trees: Manipulability-Aware Asymptotically Optimized Motion Planning. IEEE/ASME Transactions on Mechatronics, 2025, 1-12 more…
- LEMMo-Plan: LLM-Enhanced Learning from Multi-Modal Demonstration for Planning Sequential Contact-Rich Manipulation Tasks. ICRA 2025, 2025 more…
- Direction Informed Trees (DIT*): Optimal Path Planning via Direction Filter and Direction Cost Heuristic. 2025 IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2025, 1766-1772 more…
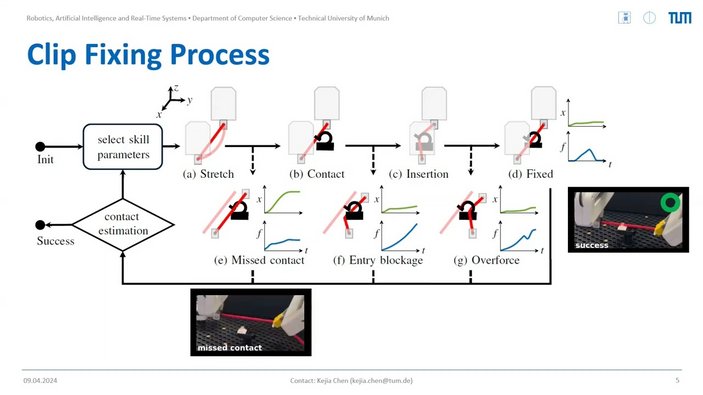
- 1 kHz Behavior Tree for Self-adaptable Tactile Insertion. 2024 IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2024, 16002-16008 more…
- Flexible Informed Trees (FIT*): Adaptive Batch-Size Approach in Informed Sampling-Based Path Planning. 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, 2024, 3146-3152 more…
- Real-time Contact State Estimation in Shape Control of Deformable Linear Objects under Small Environmental Constraints. 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024 more…
- Safety Guaranteed Manipulation Based on Reinforcement Learning Planner and Model Predictive Control Actor. , 2023 more…
- Flexible Informed Trees (FIT*): Adaptive Batch-Size Approach in Informed Sampling-Based Path Planning. , 2023 more…
- Contact-Aware Shaping and Maintenance of Deformable Linear Objects With Fixtures. 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, 2023 more…
- Learning from Symmetry: Meta-Reinforcement Learning with Symmetrical Behaviors and Language Instructions. 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), 2023 more…
- Contact-Aware Shaping and Maintenance of Deformable Linear Objects With Fixtures. 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023 more…
Kejia Chen

M.Sc. Kejia Chen
- Phone: -
- Room: 8111.01.102
- kejia.chen@tum.de
Curriculum Vitae
Kejia Chen joined the Chair of Robotics, Aritificial Intelligence and Real-time Systems in 2022 as a doctoral candidate under supervision of Prof. Alois Knoll. Before that, she received her M.Sc. degree in Robotics, Cognition and Intelligence at TUM. She is working on the project KI Fabrik. Her current research interests include
- Manipulation of Deformable (Linear) Objects
- Multi-robot Collaboration
- Skill-based Robot Learning
- LLM-enabled Planning for Robotic Manipulation.
Teaching
[IN2222] Cognitive Systems in SS22, SS23 and SS24
[IN0012, IN2106, IN4328] Masterpraktikum - Simulation-Based Machine Learning in Robotics in WS22-23, SS23, WS23-24, SS24 and WS 24-25
Open Thesis
- Topic 1: [On-going] Collision Avoidance in Dual-arm Manipulation of Deformable Linear Objects
- Topic 2: [On-going] Contact Estimation of Deformable Linear Objects through Sensory Fusion
- Topic 3: [New!] Dexterous Teleoperation for Imitation Learning
- Topic 4: [New!] Learning LLM-based Task Planning for Multi-stage Manipulation