Research Assistant

M.Sc. Josip Josifovski
- Tel.: +49 (89) 289 - 18083
- josip.josifovski@tum.de
Room: 1.103
Address: Institut für Informatik 6 Technische Universität München
Schleißheimer Straße 90A, 85748 Garching bei München
Office Hours: By email
Curriculum Vitae
Josip Josifovski joined the Chair for Robotics, Artificial Intelligence and Real-Time systems as a research assistant in September 2019. He received his Master of Science degree in Intelligent Adaptive Systems from the University of Hamburg in 2018 and his Bachelor Degree in Informatics and Computer Engineering from the Ss. Cyril and Methodius University in Skopje in 2012. His previous experience includes development of the experimental setup for cross-modal learning with the Knowledge Technology group at University of Hamburg and several years of software development experience in the industry.
At his current position, he is working on the Artificial Intelligence for Digitizing Industry (AI4DI) project, developing simulations and learning algorithms for industrial robots.
Research Interests
- Continual / Lifelong Learning in Robotics
- Simulation in Robotics
- (Cognitive) Computer Vision
- Neural Networks
- Reinforcement Learning
- Artificial General Intelligence
- Augmented Reality
Open Thesis / Guided Research Topics
Open guided research topic in: Photorealistic Rendering and Simulation in Robotics with Unity
Media

Publications
Josifovski, J., Gu, S., Malmir, M., Huang, H., Auddy, S., Navarro-Guerrero, N., Spanos, C. and Knoll, A.: Safe Continual Domain Adaptation after Sim2Real Transfer of Reinforcement Learning Policies in Robotics. arXiv preprint, 2025.
(link, video)
Josifovski, J.*, Auddy, S.*, Malmir, M., Piater, J., Knoll, A. and Navarro-Guerrero, N.: Continual Domain Randomization. In 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024.
(link, video)
Petropoulakis, P.*, Gräf, L.*, Malmir, M.^, Josifovski, J.^ and Knoll, A.: State Representations as Incentives for Reinforcement Learning Agents: A Sim2Real Analysis on Robotic Grasping. In IEEE International Conference on Systems, Man, and Cybernetics (SMC), 2024.
(link, website)
Navarro-Guerrero, N., Toprak, S., Josifovski, J., & Jamone, L.: Visuo-Haptic Object Perception for Robots: An Overview. In Autonomous Robots, 2023. (link).
Josifovski, J., Malmir, M., Klarmann, N., Žagar, B. L., Navarro-Guerrero, N., & Knoll, A.: Analysis of Randomization Effects on Sim2Real Transfer in Reinforcement Learning for Robotic Manipulation Tasks. In 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022. (link, video)
Oliva, M., Banik, S.*, Josifovski, J.*, & Knoll, A.: Graph Neural Networks for Relational Inductive Bias in Vision-based Deep Reinforcement Learning of Robot Control. In International Joint Conference on Neural Networks (IJCNN) 2022. (link)
Klarmann, N.*; Malmir, M.*; Josifovski, J.*; Plorin, D.; Wagner, M.; Knoll, A.: Optimising Trajectories in Simulations with Deep Reinforcement Learning for Industrial Robots in Automotive Manufacturing. In Artificial Intelligence for Digitising Industry Applications, ISBN: 9788770226646 (pp. 35-45), River Publishers, 2021. (link, video)
Wiedemann, T., Vlaicu, C., Josifovski, J. and Viseras, A.: Robotic Information Gathering with Reinforcement Learning Assisted by Domain Knowledge: An Application to Gas Source Localization. In IEEE Access, 9, (pp.13159-13172), 2021. (link, video)
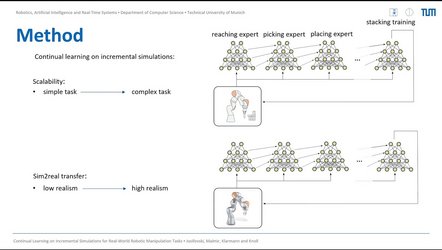
Josifovski, J.; Malmir, M.; Klarmann, N.; Knoll, A.: Continual Learning on Incremental Simulations for Real-World Robotic Manipulation Tasks. In 2nd Workshop on Closing the Reality Gap in Sim2Real Transfer for Robotics, 2020. (link, video)
Malmir, M.; Josifovski, J.; Klarmann, N.; Knoll, A.: Robust Sim2Real Transfer by Learning Inverse Dynamics of Simulated Systems. In 2nd Workshop on Closing the Reality Gap in Sim2Real Transfer for Robotics, 2020. (link, video)
Josifovski, J., Kerzel, M., Pregizer, C., Posniak, L. and Wermter, S.: Object detection and pose estimation based on convolutional neural networks trained with synthetic data. In 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 6269-6276), IEEE, 2018. (link, video)
Wieser, I., Toprak, S., Grenzing, A., Hinz, T., Auddy, S., Karaoğuz, E.C., Chandran, A., Remmels, M., El Shinawi, A., Josifovski, J., Vankadara, L.C., Wahab, F., Bahnemiri, A., Sahu, D., Heinrich, S., Navarro-Guerrero, N., Strahl, E., Twiefel, J., Wermter, S.: A Robotic Home Assistant with Memory Aid Functionality. In Joint German/Austrian Conference on Artificial Intelligence (Künstliche Intelligenz) (pp. 102-115). Springer, Cham, 2016. (link, video)
Teaching
SS23 Masterpraktikum - Simulation-Based Machine Learning in Robotics (IN0012, IN2106, IN4328)
WS22/23 Masterpraktikum - Simulation-Based Machine Learning in Robotics (IN2106, IN0012, IN4287)
SS22 Masterpraktikum - Cloud-Based Machine Learning in Robotics (IN2106, IN0012, IN4287)
WS21/22 Masterpraktikum - Cloud-Based Machine Learning in Robotics (IN2106, IN0012, IN4287)
SS21 Masterpraktikum - Cloud-Based Machine Learning in Robotics (IN2106, IN0012, IN4287)
WS20/21 Masterpraktikum - Cloud-Based Machine Learning in Robotics (IN2106, IN0012, IN4287)
SS2020 Software Engineering in Robotics
Thesis Advising
Completed:
- Master's Thesis: Automatic Rotation Correction for a Hybrid Fiber-Endoscopy-Video-Scope System; Student: Gergana Kratuncheva
- Master's Thesis: Reinforcement Learning for Gas Source Localization; Student: Cosmin Vlaicu
- Master's Thesis: Continual Reinforcement Learning for Robotic Manipulation Tasks using Time-Contrastive Networks; Student: Christoph Tittel
- Bachelor's Thesis: Application of Game Engines for Environment Randomization in Simulation-trained Computer Vision Tasks; Student: Florian Panzer
- Bachelor's Thesis: Reinforcement Learning: Comparison between Different State Representations for Solving a Reaching Task with Robotic Manipulator; Student: Meric Sakarya
- Master's Thesis: Simulation-Based Hierarchical Reinforcement Learning for Robotic Manipulation Tasks; Student: Shruthi Narayani Venkatesh (co-advising with Noah Klarmann & Mohammadhossein Malmir)
- Bachelor's Thesis: Effects of Parallelization on Training Reinforcement Learning Algorithms with Simulated Robots; Student: Tobias Klausen
- Bachelor's Thesis: Integration of AI Solutions for Robot Control in Automotive Manufacturing Processes; Student: Liljana Spasovska
- Master's Thesis: Graph Networks for Relational Inductive Bias in Vision-Based Deep Reinforcement Learning of Robotic Manipulator Control; Student: Marco Oliva (co-advising with Soubarna Banik)
- Master's Thesis: Vision-Based Continual Reinforcement Learning for Robotic Manipulation Tasks; Student: Marcel Bruckner (co-advising with Zhenshan Bing and Mohammadhossein Malmir)
- Master's Thesis: Vision-Based Deep Reinforcement Learning for Robotic Grasping; Student: Yanmei Zhao
Ongoing:
- Master's Thesis: Robotic Grasping with Deep Reinforcement Learning using Suboptimal Teacher Policies; Student: Daniel Johannes Hettegger (co-advising with Mohammadhossein Malmir and Arne Peters)
- Master's Thesis: Cloning Dynamics of Robotic Manipulation via Explicit Model-based Reinforcement Learning; Student: Johannes Kiwi (co-advising with Mohammadhossein Malmir)
- Bachelor's Thesis: Comparison of Vision-based State Representation Learning Algorithms in Reinforcement Learning for Robotic Reaching Tasks; Student: Oliver Lemke