Neurorobotic Mouse - NeRmo

With strong adaptability to complex terrain, quadruped robots have been widely applied in real-world tasks. To enhance quadruped robots’ environmental adaptability in narrow space, one solution is to design a small-sized biomimetic robot that has multiple locomotion and posture, such as the rat robot. There is a great challenge to design a small-sized biomimetic robot with high velocity and high flexibility. To do this, inspired by mice in nature, the rat robot is designed with a soft actuated spine, which can do lateral flexing and optimize legs locomotion.
Vision
Robotic Motion
Motion data recorded from biological mice
The data is provided by our collaborator Dr. Satoshi Oota, RIKEN, Japan.
Learning Straight Gaits with RL
Learning Turning Gaits with RL
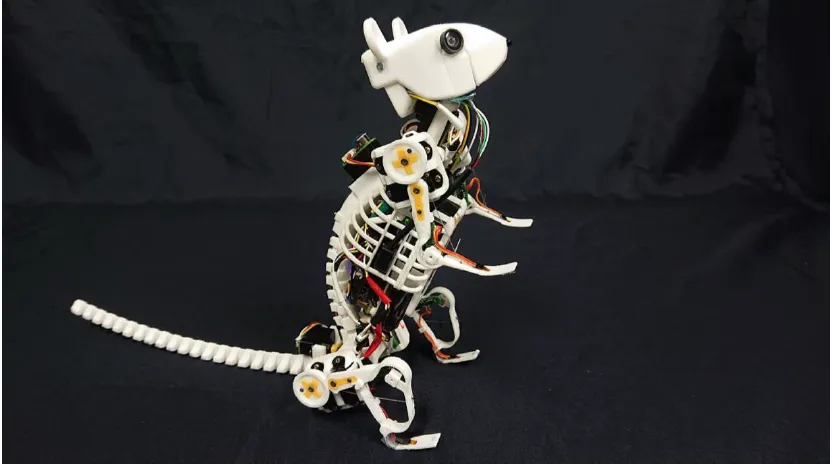
Images of NeRmo